MMSE Estimation and Prediction
EE 541 - Unit 3
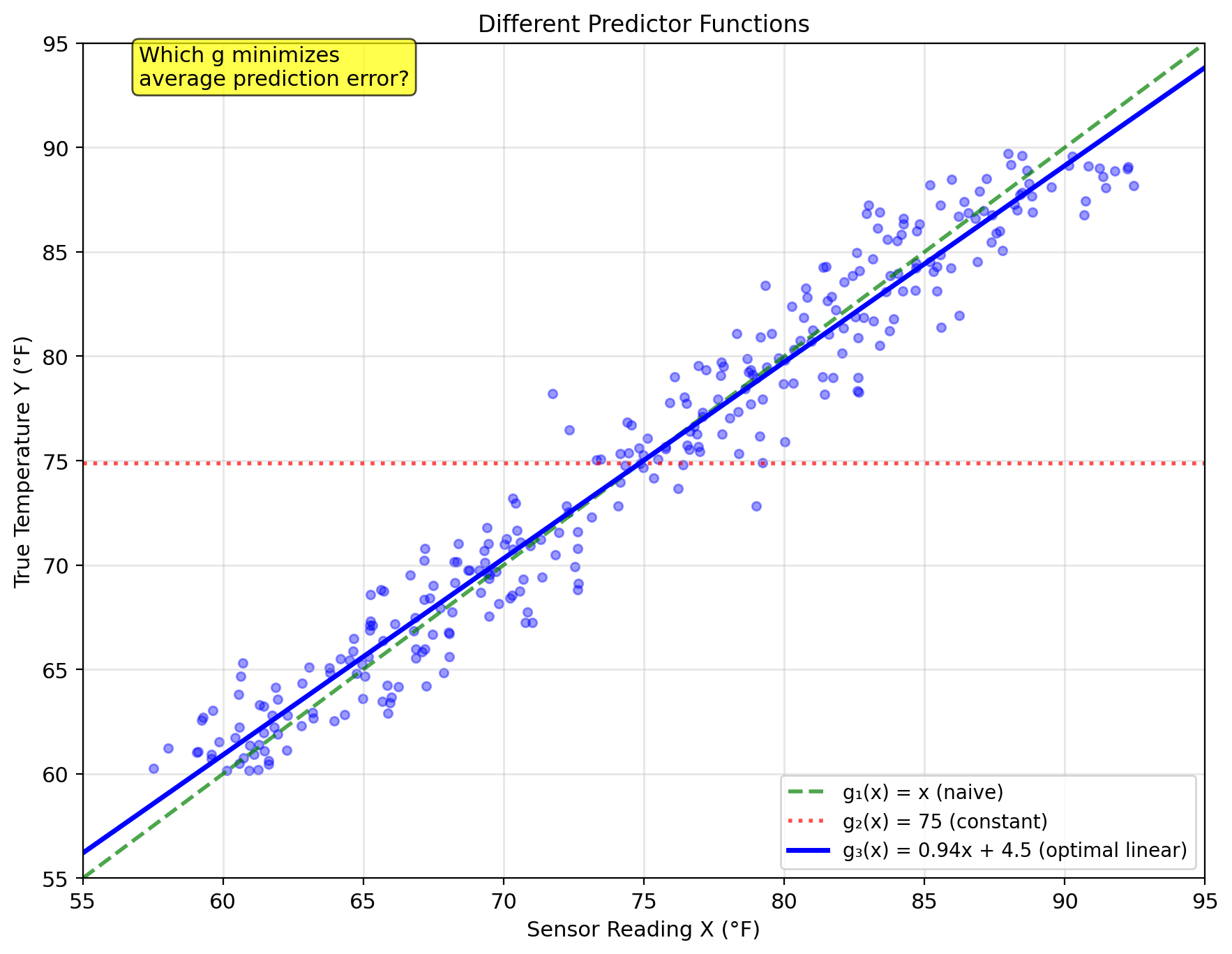
Best Predictor Minimizes Expected Loss
Problem:
- \(Y\): quantity of interest (unknown)
- \(X\): observation (known)
- \((X, Y)\): jointly distributed random variables
Predictor function: \(g: \mathbb{R} \to \mathbb{R}\) \[\hat{Y} = g(X)\]
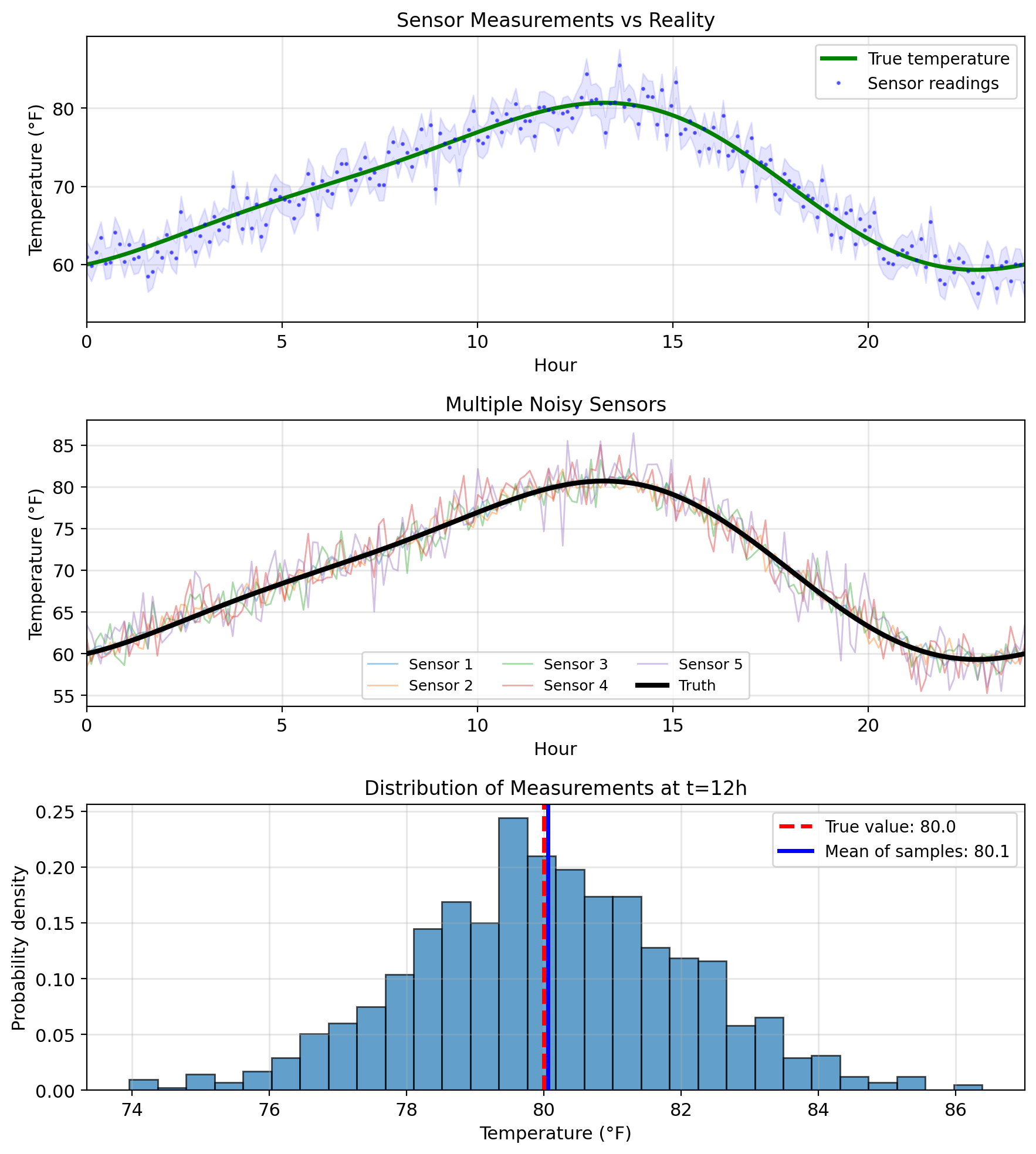
Example: Room temperature estimation
- \(Y\): true temperature
- \(X\): sensor reading = \(Y + N\)
- \(N\): measurement noise
- \(g(X) =\) ? Best guess for \(Y\) given reading \(X\)
Among all possible functions \(g\), which one is “best”?
Need:
- What we mean by “best” (loss function)
- How to average over randomness (expectation)
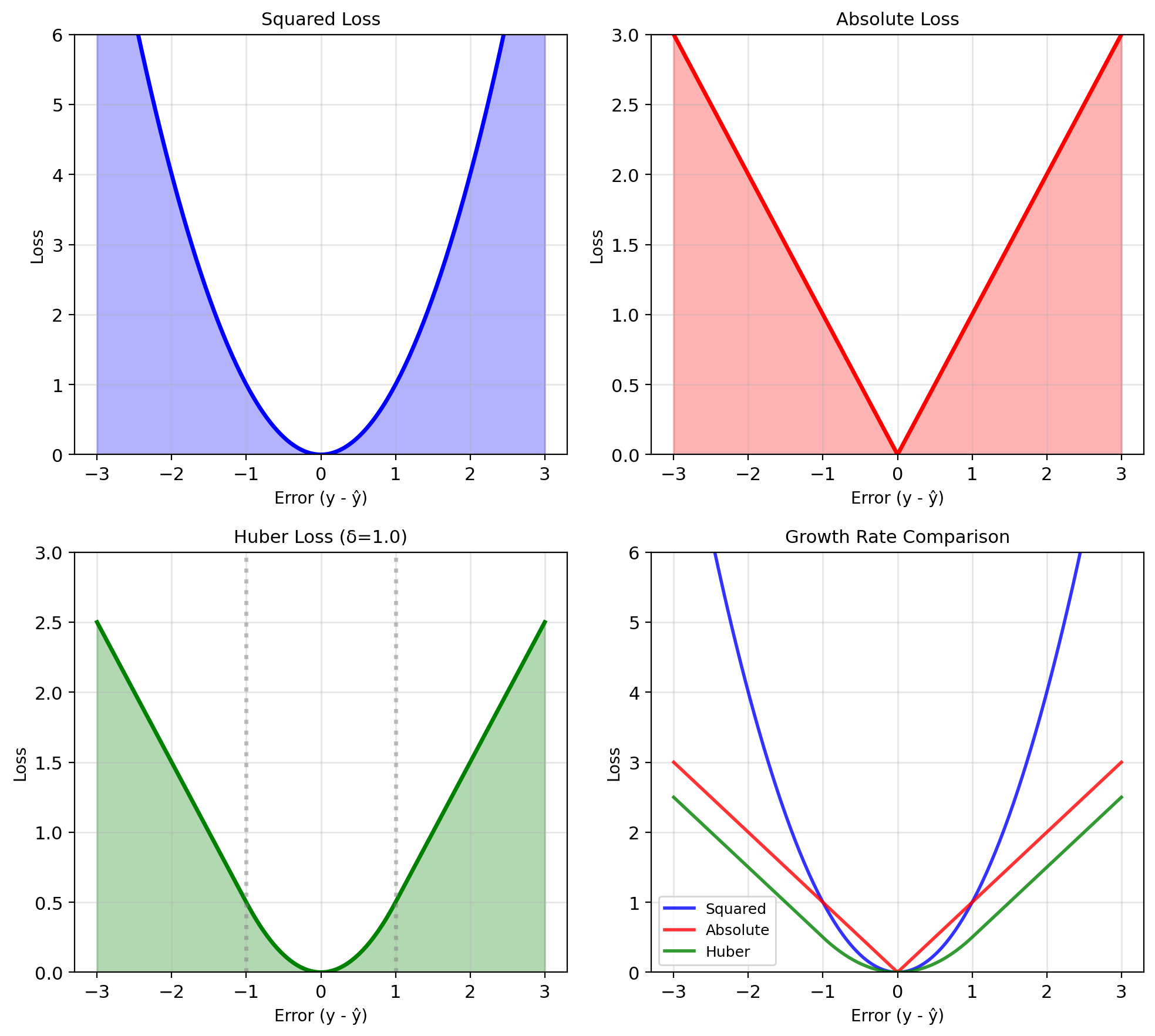
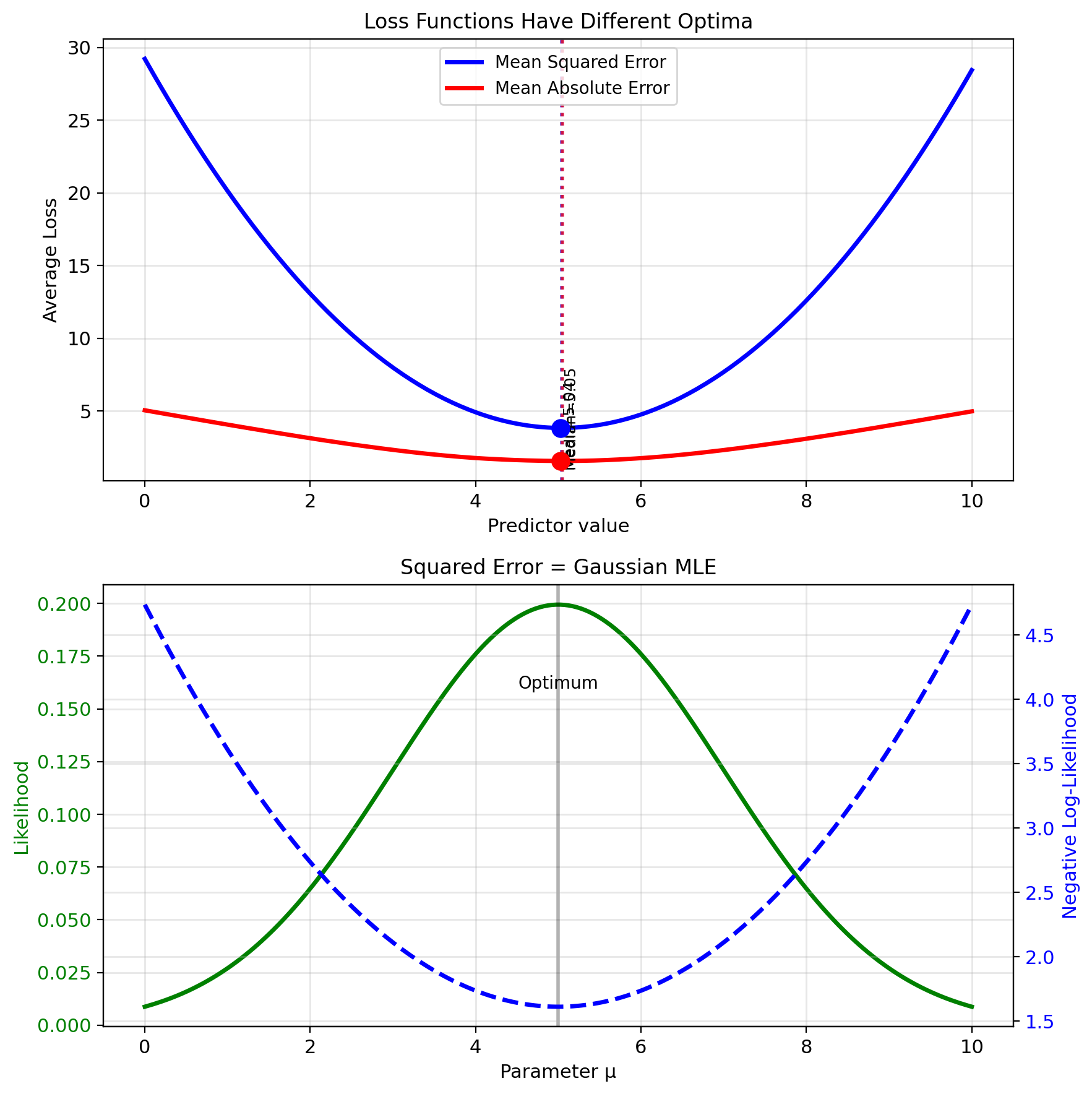
Loss Functions Penalize Prediction Error
Loss function \(\ell(y, \hat{y})\) measures prediction quality
Common choices:
| Loss | Formula | Properties |
|---|---|---|
| Squared | \((y - \hat{y})^2\) | Differentiable, convex, emphasizes large errors |
| Absolute | \(\|y - \hat{y}\|\) | Robust to outliers, non-differentiable at 0 |
| 0-1 | \(\mathbb{1}[y \neq \hat{y}]\) | Classification, discontinuous |
| Huber | \(\begin{cases} \frac{1}{2}(y-\hat{y})^2 & \|y-\hat{y}\| \leq \delta \\ \delta\|y-\hat{y}\| - \frac{\delta^2}{2} & \text{otherwise} \end{cases}\) | Robust + differentiable |
Risk: Expected loss over joint distribution \[R(g) = \mathbb{E}[\ell(Y, g(X))] = \int\int \ell(y, g(x)) p(x,y) \, dx \, dy\]
Goal: Find \(g^* = \arg\min_g R(g)\)
Squared Error Gives Closed Forms
Mathematical advantages:
Differentiable: \[\frac{d}{d\hat{y}}(y - \hat{y})^2 = -2(y - \hat{y})\] Smooth objective
Unique minimum: Strictly convex → no local minima
Closed-form solutions: Often analytically tractable
Decomposition: \[\text{MSE} = \text{Bias}^2 + \text{Variance}\]
Statistical connection:
Under Gaussian noise \(N \sim \mathcal{N}(0, \sigma^2)\): \[Y = \mu + N\]
Maximum likelihood estimation: \[\hat{\mu}_{\text{MLE}} = \arg\max_\mu p(y|\mu) = \arg\min_\mu (y - \mu)^2\]
MSE ↔︎ Gaussian MLE
MSE = Bias² + Variance
Definition: \[\text{MSE}(g) = \mathbb{E}[(Y - g(X))^2]\]
Expanding the expectation: \[\text{MSE}(g) = \int\int (y - g(x))^2 p(x,y) \, dx \, dy\]
Empirical MSE (from data): \[\widehat{\text{MSE}} = \frac{1}{n} \sum_{i=1}^n (y_i - g(x_i))^2\]
Properties:
- Always non-negative: MSE ≥ 0
- Zero iff perfect prediction: MSE = 0 ⟺ P(Y = g(X)) = 1
- Units: [MSE] = [Y]²
Other forms:
- RMSE = √MSE (same units as Y)
- Normalized MSE = MSE/Var(Y)
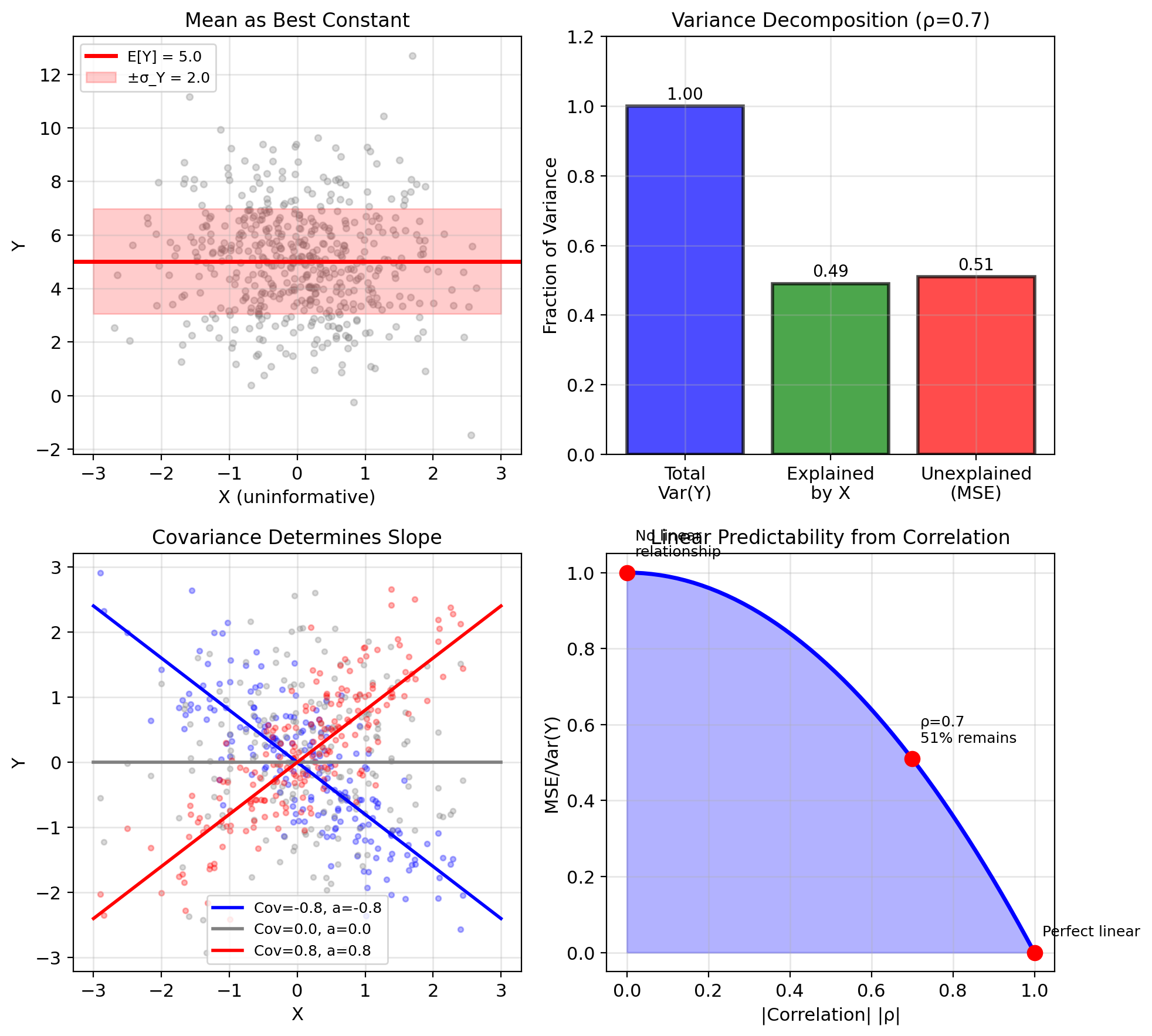
- \(\rho^2\) = 1 - MSE/Var(Y)
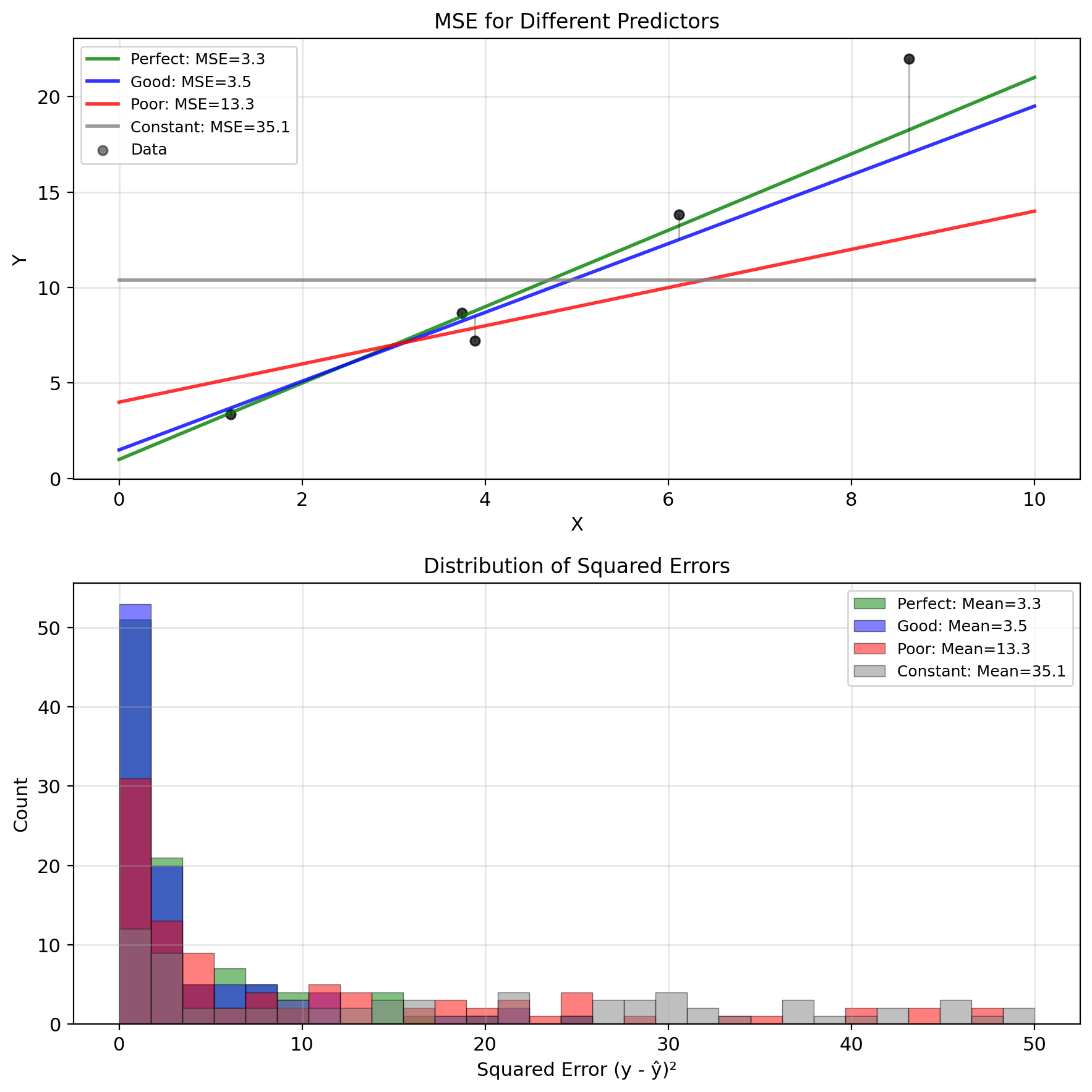
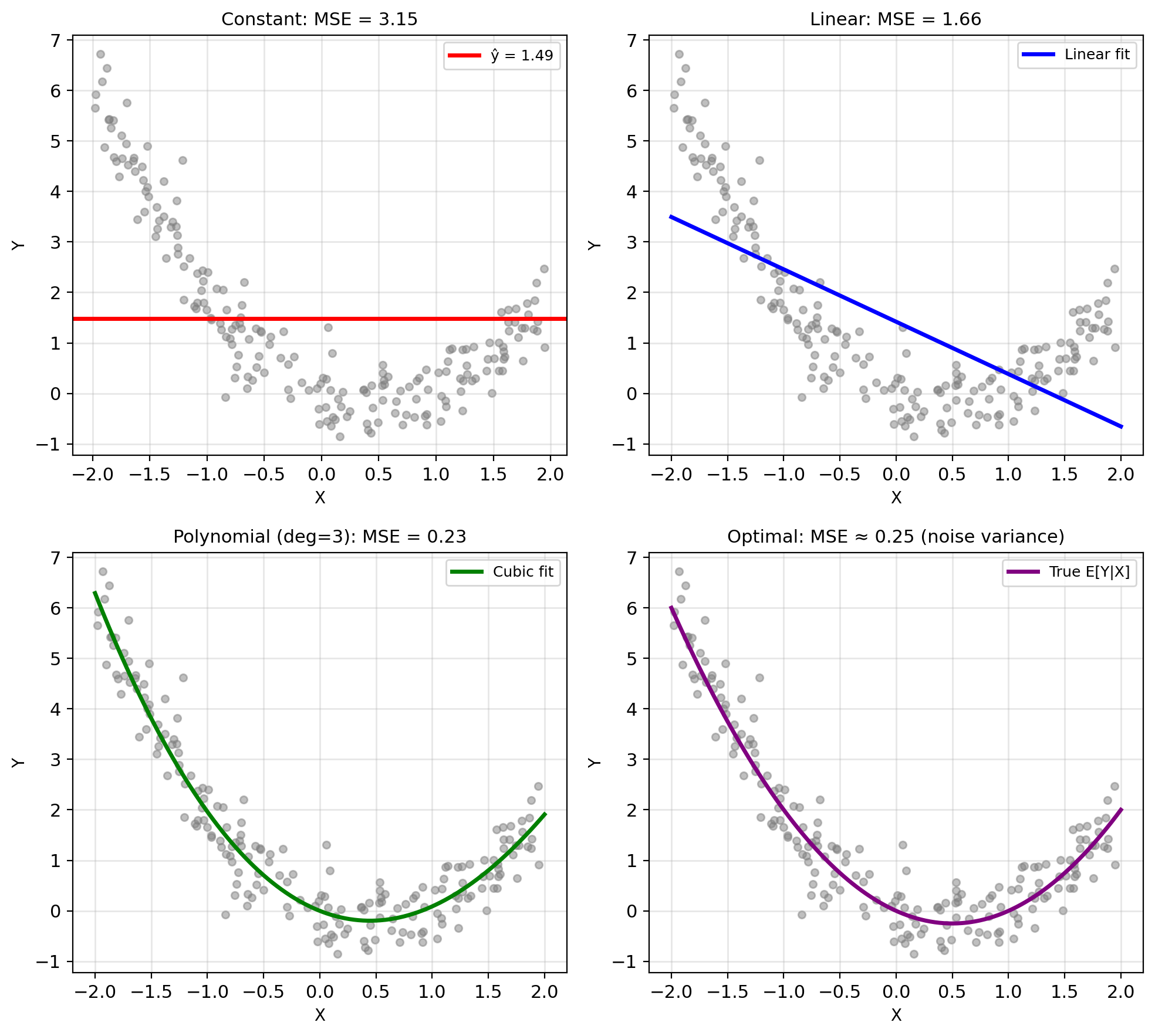
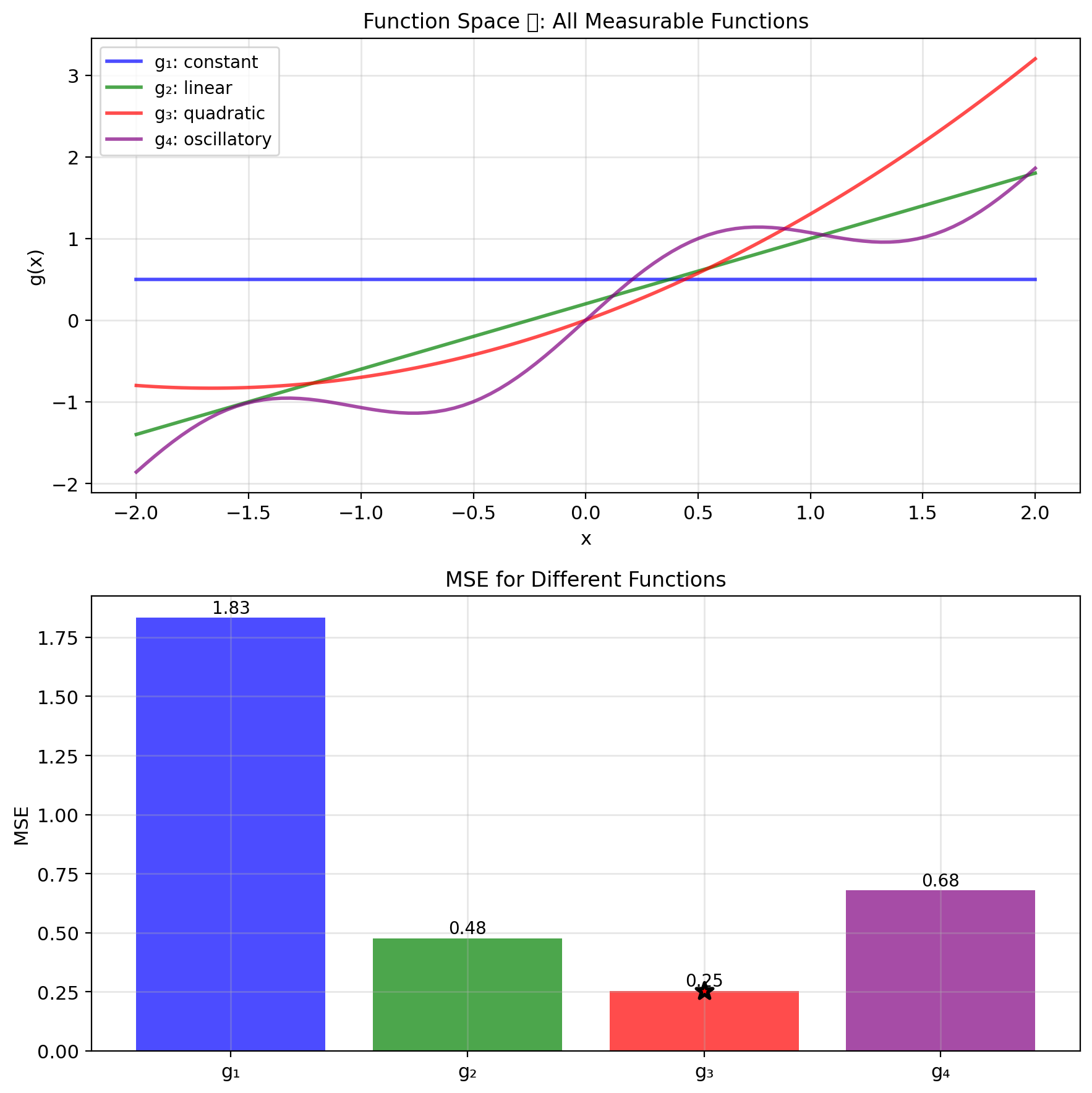
More Flexible = Harder to Optimize
Hierarchy of function classes:
- Constant: \(\hat{Y} = c\)
- Ignores observation X
- Optimal: \(c^* = \mathbb{E}[Y]\)
- MSE = Var(Y)
- Linear (affine): \(\hat{Y} = aX + b\)
- Simple, interpretable
- Only two parameters to optimize
- Many relationships are approximately linear
- Polynomial: \(\hat{Y} = \sum_{k=0}^p a_k X^k\)
- More flexible
- Risk of overfitting
- Unrestricted: \(\hat{Y} = g(X)\)
- Any measurable function
- Maximum flexibility
- Requires knowing \(p(y|x)\)
Flexibility vs Tractability
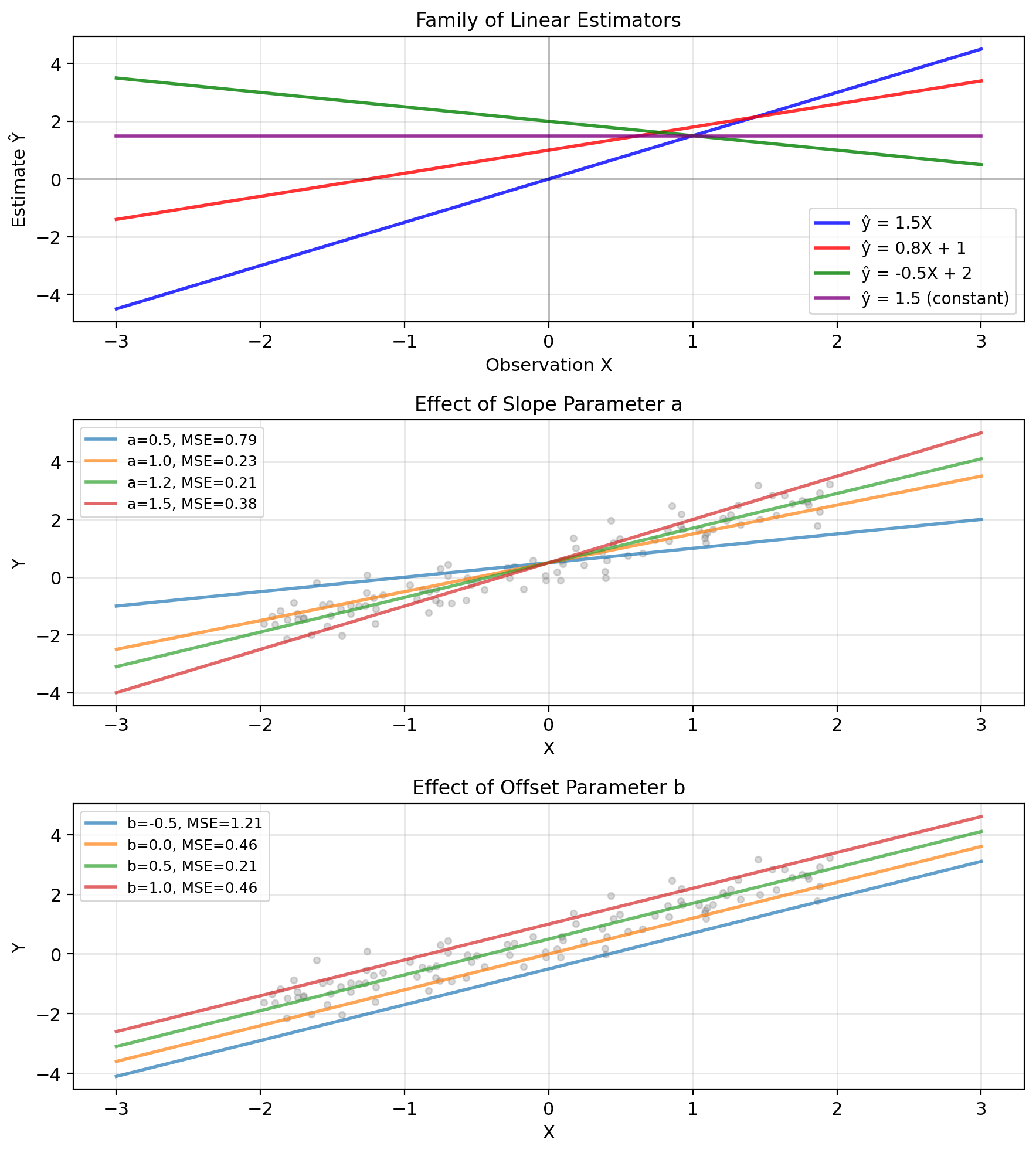
Linear Estimators: ŷ = aX + b
Definition: A linear estimator has the form \[\hat{Y} = aX + b\] where \(a, b \in \mathbb{R}\) are constants.
Note: “Linear” means linear in \(X\), not linear in parameters.
- \(\hat{Y} = 3X + 2\) is linear (in \(X\))
- \(\hat{Y} = \beta X^2\) is NOT linear (quadratic in \(X\))
- Despite \(\beta\) appearing linearly!
Parameters:
- \(a\): slope/gain/sensitivity
- \(b\): offset/bias/intercept
Special cases:
- \(b = 0\): Proportional estimator \(\hat{Y} = aX\)
- \(a = 0\): Constant estimator \(\hat{Y} = b\)
- \(a = 1, b = 0\): Direct use \(\hat{Y} = X\)
Property: Superposition If \(\hat{Y}_1 = aX_1 + b\) and \(\hat{Y}_2 = aX_2 + b\), then: \[\alpha\hat{Y}_1 + \beta\hat{Y}_2 = a(\alpha X_1 + \beta X_2) + (\alpha + \beta)b\]
Matrix form (preview): \[\hat{\mathbf{y}} = \mathbf{A}\mathbf{x} + \mathbf{b}\]
Moments Suffice for Linear Prediction
Mean E[Y]: Baseline predictor
- Best constant estimate
- What to predict without observing \(X\)
- MSE = Var(Y) when ignoring observations
Variance Var(Y): Spread/uncertainty
- Total variation to explain
- Upper bound on MSE (constant predictor)
- Normalizes performance: R² = 1 - MSE/Var(Y)
Covariance Cov(X,Y): Linear relationship strength
- Determines optimal linear slope
- Zero → X doesn’t help linearly
- Sign → direction of relationship
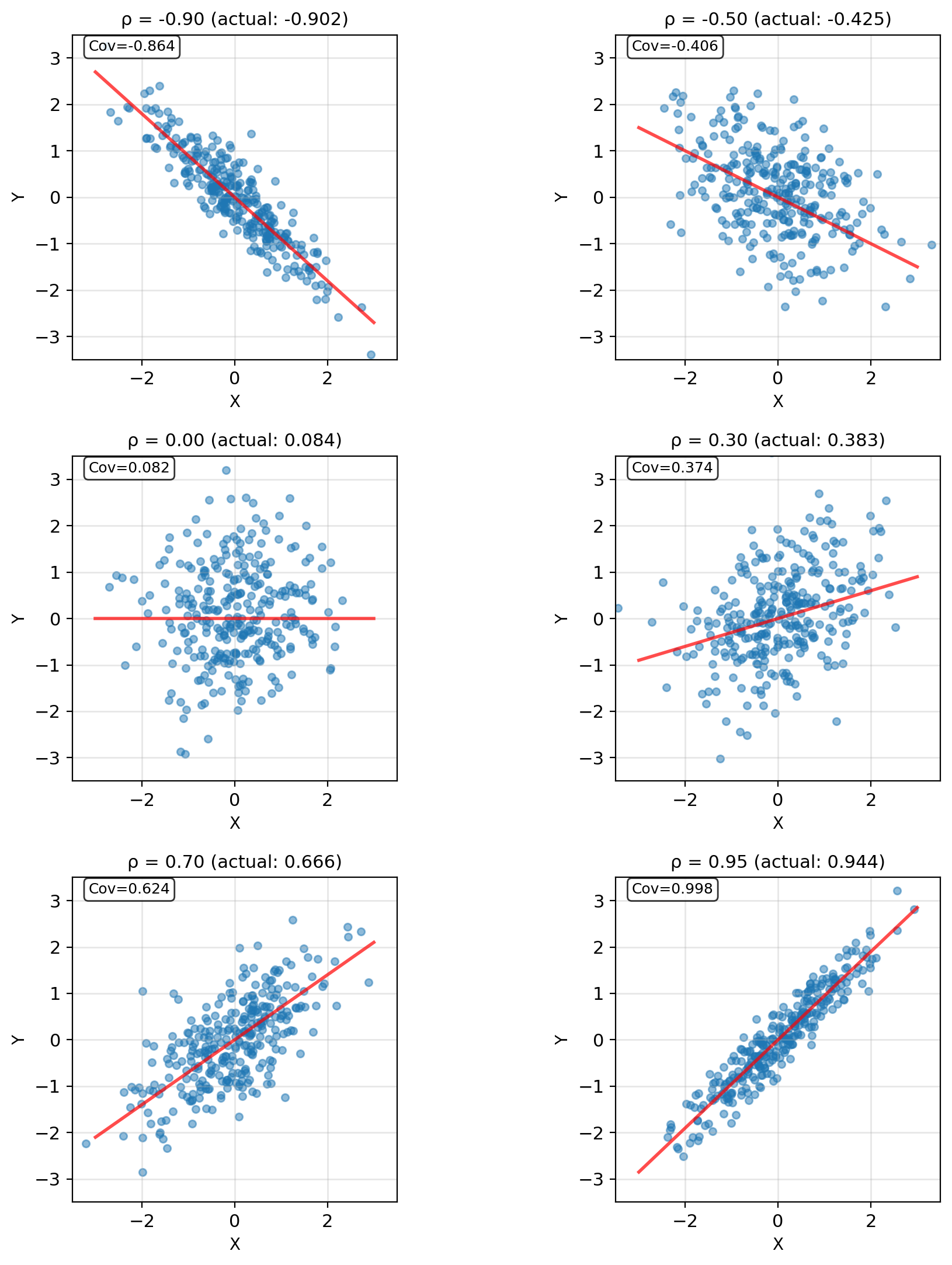
Correlation ρ: Normalized association
- Scale-free measure ∈ [-1, 1]
- |ρ| = 1 → perfect linear prediction possible
- ρ² = fraction of variance explained linearly
These moments completely determine the optimal linear estimator
Covariance Quantifies Linear Dependence
First moments: \[\mathbb{E}[Y] = \int y \, p(y) \, dy\]
Second moments: \[\mathbb{E}[Y^2] = \int y^2 \, p(y) \, dy\]
Variance: \[\text{Var}(Y) = \mathbb{E}[(Y - \mathbb{E}[Y])^2] = \mathbb{E}[Y^2] - (\mathbb{E}[Y])^2\]
Covariance: \[\text{Cov}(X,Y) = \mathbb{E}[(X - \mathbb{E}[X])(Y - \mathbb{E}[Y])]\] \[= \mathbb{E}[XY] - \mathbb{E}[X]\mathbb{E}[Y]\]
Correlation coefficient: \[\rho_{XY} = \frac{\text{Cov}(X,Y)}{\sqrt{\text{Var}(X)\text{Var}(Y)}} \in [-1, 1]\]
- \(|\rho| = 1\): Perfect linear relationship
- \(\rho = 0\): Uncorrelated (not necessarily independent!)
- Sign indicates direction
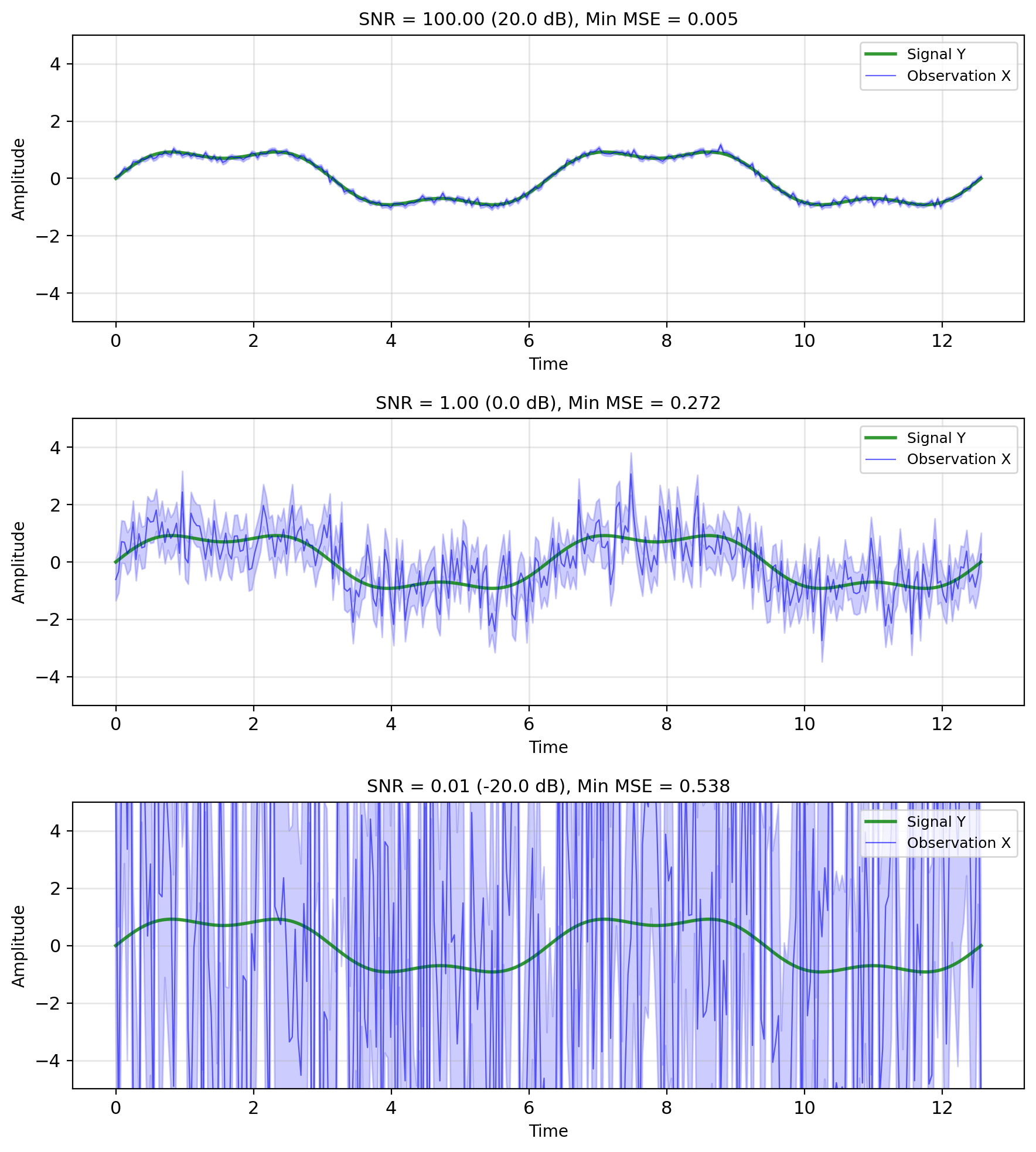
SNR Limits Achievable MSE
Additive noise model: \[X = Y + N\]
- \(Y\): true signal (what we want)
- \(N\): noise (corruption)
- \(X\): observation (what we get)
- Independence: \(Y \perp N\)
Signal-to-Noise Ratio (SNR): \[\text{SNR} = \frac{\text{Power}(Y)}{\text{Power}(N)} = \frac{\mathbb{E}[Y^2]}{\mathbb{E}[N^2]}\]
For zero-mean: \[\text{SNR} = \frac{\sigma_Y^2}{\sigma_N^2}\]
In dB: \(\text{SNR}_{\text{dB}} = 10\log_{10}(\text{SNR})\)
Fundamental limit: Even with optimal estimation, cannot remove all noise: \[\text{MSE}_{\text{min}} \geq \frac{\sigma_Y^2 \sigma_N^2}{\sigma_Y^2 + \sigma_N^2} = \frac{\sigma_Y^2}{1 + \text{SNR}}\]
Random Variables Map Outcomes to Numbers
Sample space \(\Omega\): Set of all possible outcomes
Random variable \(X: \Omega \to \mathbb{R}\)
Maps each outcome to a real number.
Notation convention:
- \(X\) (uppercase): The random variable (a function)
- \(x\) (lowercase): A specific realized value
Discrete example: Die roll
- \(\Omega = \{\omega_1, \omega_2, \omega_3, \omega_4, \omega_5, \omega_6\}\)
- \(X(\omega_i) = i\)
- \(P(X = 3) = 1/6\)
Continuous example: Measurement noise
- \(\Omega\) = all possible noise realizations
- \(X(\omega)\) = voltage at time \(t\)
- \(P(X = 1.5)\) = 0, but \(P(1.4 < X < 1.6) > 0\)
Joint Distributions Capture Relationships Between Variables
Joint distribution \(p(x, y)\):
Probability (density) that \(X = x\) AND \(Y = y\) simultaneously.
For discrete: \(P(X = x, Y = y)\)
For continuous: \(p(x,y)\) where \[P(a < X < b, c < Y < d) = \int_a^b \int_c^d p(x,y) \, dy \, dx\]
What the joint tells you:
- How likely are specific \((x, y)\) pairs?
- Are \(X\) and \(Y\) related or independent?
- Everything about marginals and conditionals
Independence means: \[p(x, y) = p(x) \cdot p(y)\]
Joint factors into product of marginals.
Marginals and Conditionals From the Joint
Marginal distribution: Integrate out what you don’t need
\[p(x) = \int p(x, y) \, dy\]
\[p(y) = \int p(x, y) \, dx\]
Conditional distribution: Slice and renormalize
\[p(y|x) = \frac{p(x, y)}{p(x)}\]
Bayes’ rule is just rearranging:
\[p(y|x) = \frac{p(x|y) \, p(y)}{p(x)}\]
Computational view:
- Start with joint \(p(x,y)\)
- Fix \(x\) to get a slice
- Divide by \(p(x)\) to make it integrate to 1
This is conditioning as a mechanical operation.
Expectation Is a Weighted Average
Discrete: \[\mathbb{E}[X] = \sum_x x \cdot P(X = x)\]
Continuous: \[\mathbb{E}[X] = \int x \cdot p(x) \, dx\]
Interpretation: Center of mass of the distribution
Expectation of a function: \[\mathbb{E}[g(X)] = \int g(x) \cdot p(x) \, dx\]
Example: Die roll
\(\mathbb{E}[X] = 1 \cdot \frac{1}{6} + 2 \cdot \frac{1}{6} + \cdots + 6 \cdot \frac{1}{6} = 3.5\)
Note: 3.5 is not a possible outcome, but it’s the long-run average.
Linearity of Expectation Holds for Any Joint Distribution
Linearity: \[\mathbb{E}[aX + bY] = a\mathbb{E}[X] + b\mathbb{E}[Y]\]
This holds even if \(X\) and \(Y\) are dependent.
Why? Just rearranging sums/integrals: \[\mathbb{E}[X + Y] = \int\int (x + y) p(x,y) \, dx \, dy\] \[= \int\int x \, p(x,y) \, dx \, dy + \int\int y \, p(x,y) \, dx \, dy\] \[= \int x \, p(x) \, dx + \int y \, p(y) \, dy\] \[= \mathbb{E}[X] + \mathbb{E}[Y]\]
Example: Sum of two dice
\(\mathbb{E}[X_1 + X_2] = \mathbb{E}[X_1] + \mathbb{E}[X_2] = 3.5 + 3.5 = 7\)
No need to enumerate all 36 outcomes.
Variance Measures Spread Around the Mean
Definition: \[\text{Var}(X) = \mathbb{E}[(X - \mu)^2]\]
where \(\mu = \mathbb{E}[X]\)
Computational form: \[\text{Var}(X) = \mathbb{E}[X^2] - (\mathbb{E}[X])^2\]
When to use which:
- Definition: Intuition (average squared deviation from mean)
- Computational: Calculation (often simpler)
Standard deviation: \(\sigma = \sqrt{\text{Var}(X)}\)
Same units as \(X\) (variance has squared units)
Properties:
- \(\text{Var}(X) \geq 0\)
- \(\text{Var}(aX + b) = a^2 \text{Var}(X)\)
- Adding constant shifts mean, doesn’t change spread
Covariance Measures Linear Co-Movement
Definition: \[\text{Cov}(X, Y) = \mathbb{E}[(X - \mu_X)(Y - \mu_Y)]\]
Computational form: \[\text{Cov}(X, Y) = \mathbb{E}[XY] - \mathbb{E}[X]\mathbb{E}[Y]\]
Interpretation:
- \(\text{Cov} > 0\): When \(X\) is above its mean, \(Y\) tends (on average) to be above its mean
- \(\text{Cov} < 0\): When \(X\) is above its mean, \(Y\) tends to be below its mean
- \(\text{Cov} = 0\): No linear relationship
Correlation (normalized covariance): \[\rho = \frac{\text{Cov}(X,Y)}{\sigma_X \sigma_Y} \in [-1, 1]\]
\(\text{Cov}(X,Y) = 0\) does NOT imply independence.
\(Y = X^2\) with \(X \sim \mathcal{N}(0,1)\): clearly dependent, but \(\text{Cov}(X, Y) = 0\).
Variance of Sums Depends on Covariance
For two random variables: \[\text{Var}(X + Y) = \text{Var}(X) + \text{Var}(Y) + 2\text{Cov}(X, Y)\]
If uncorrelated (\(\text{Cov}(X,Y) = 0\)): \[\text{Var}(X + Y) = \text{Var}(X) + \text{Var}(Y)\]
Compare with (linear) expectation:
- \(\mathbb{E}[X + Y] = \mathbb{E}[X] + \mathbb{E}[Y]\) always
- \(\text{Var}(X + Y) = \text{Var}(X) + \text{Var}(Y)\) only if uncorrelated
General form: \[\text{Var}\left(\sum_i a_i X_i\right) = \sum_i a_i^2 \text{Var}(X_i) + 2\sum_{i < j} a_i a_j \text{Cov}(X_i, X_j)\]
Why this matters: Diversification in portfolios, error propagation, averaging measurements
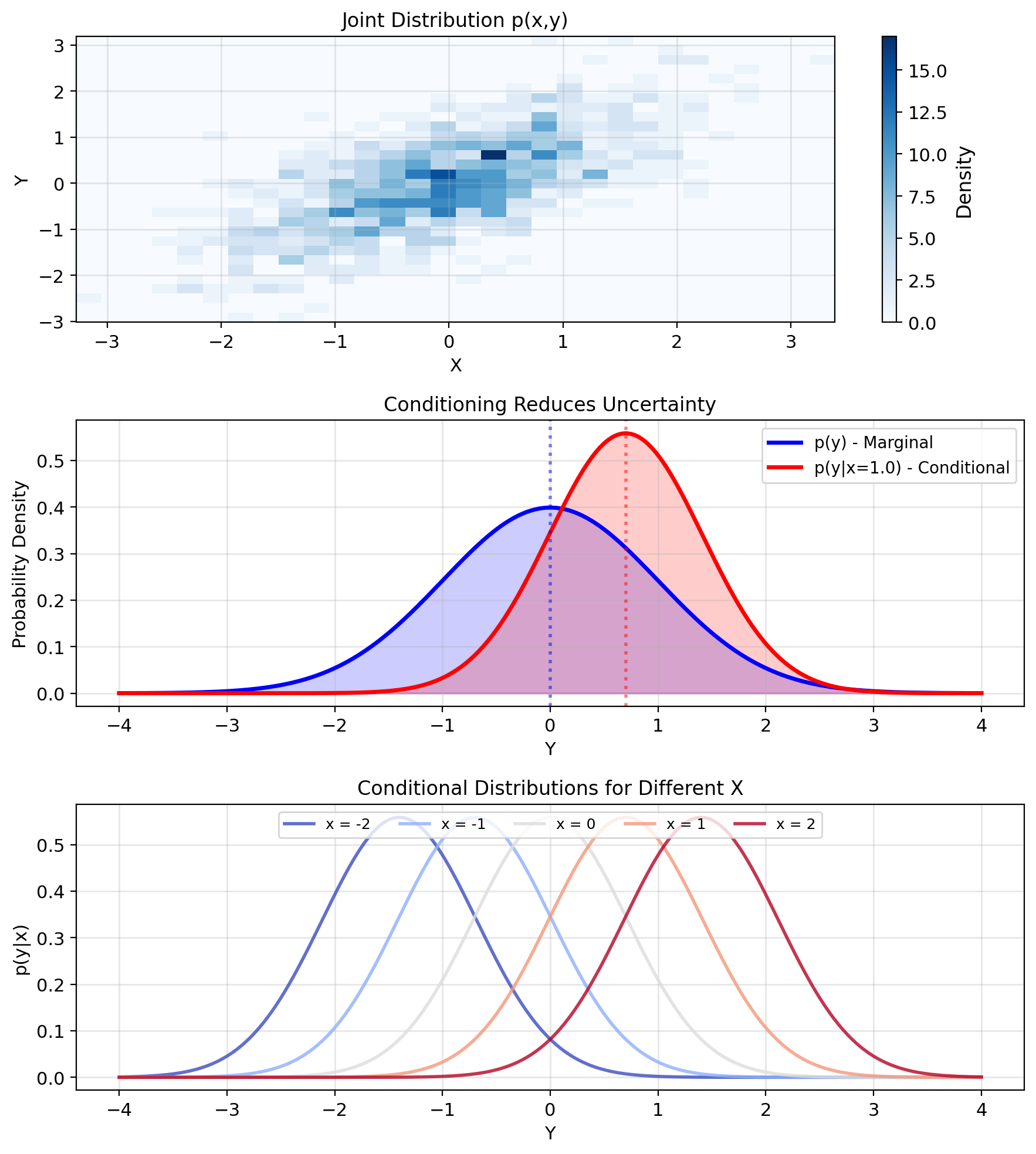
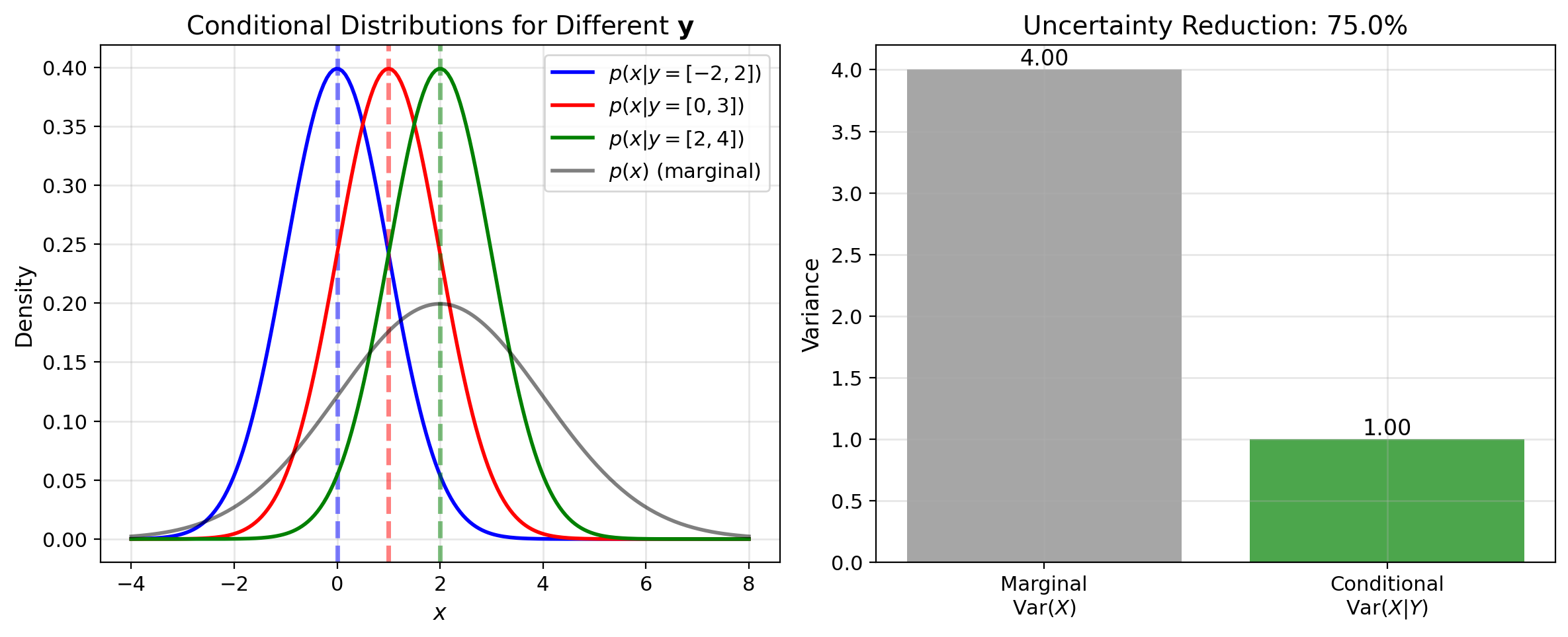
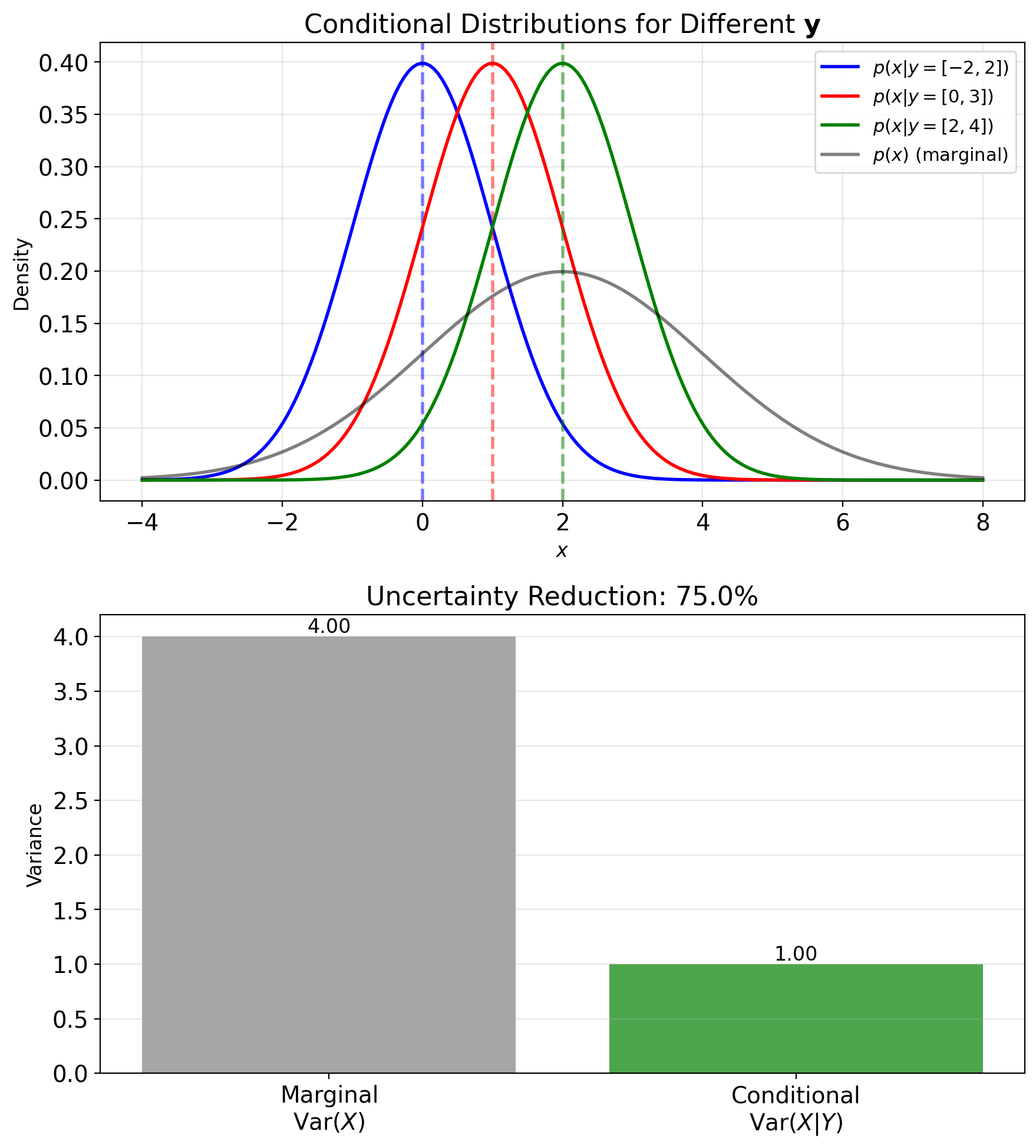
Observations Shrink the Distribution
Joint distribution \((X, Y) \sim p(x,y)\) contains all information.
Bayes’ rule: \[p(y|x) = \frac{p(x,y)}{p(x)} = \frac{p(x,y)}{\int p(x,y') dy'}\]
Once we observe \(X = x\), the distribution of \(Y\) changes from \(p(y)\) to \(p(y|x)\).
Example: Temperature sensor
- Prior: \(Y \sim \mathcal{N}(70, 10^2)\) (before measurement)
- Observe: \(X = 75\) (sensor reading)
- Posterior: \(Y|X=75 \sim \mathcal{N}(73, 4^2)\) (after measurement)
Conditioning incorporates information, reducing spread.
Conditioning reduces uncertainty
Discrete case: \[P(Y = y|X = x) = \frac{P(X = x, Y = y)}{P(X = x)}\]
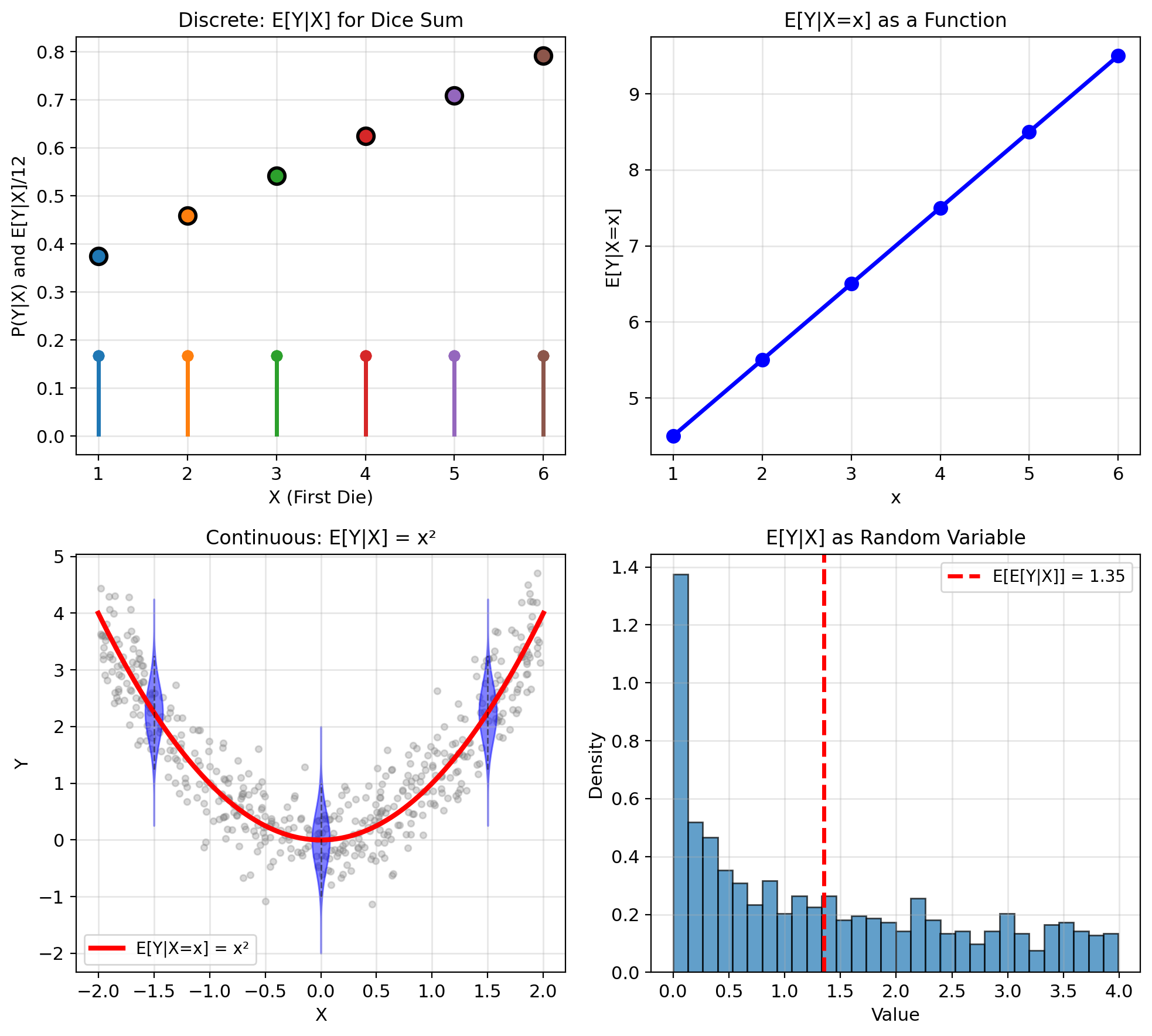
E[Y|X=x] Is a Number; E[Y|X] Is a Random Variable
Definition: The conditional expectation of \(Y\) given \(X = x\) is:
Discrete case: \[\mathbb{E}[Y|X=x] = \sum_y y \cdot P(Y=y|X=x)\]
Continuous case: \[\mathbb{E}[Y|X=x] = \int_{-\infty}^{\infty} y \cdot p(y|x) \, dy\]
Facts:
- \(\mathbb{E}[Y|X=x]\) is a number (for fixed \(x\))
- expectation when \(X\) equals \(x\)
- \(\mathbb{E}[Y|X]\) is a random variable (function of \(X\))
- \(g(x) = \mathbb{E}[Y|X=x]\) is a deterministic function
Example: \(Y = X + N\), \(N \sim \mathcal{N}(0,1)\), independent \(X\) and \(N\) \[\mathbb{E}[Y|X=x] = \mathbb{E}[x + N] = x\]
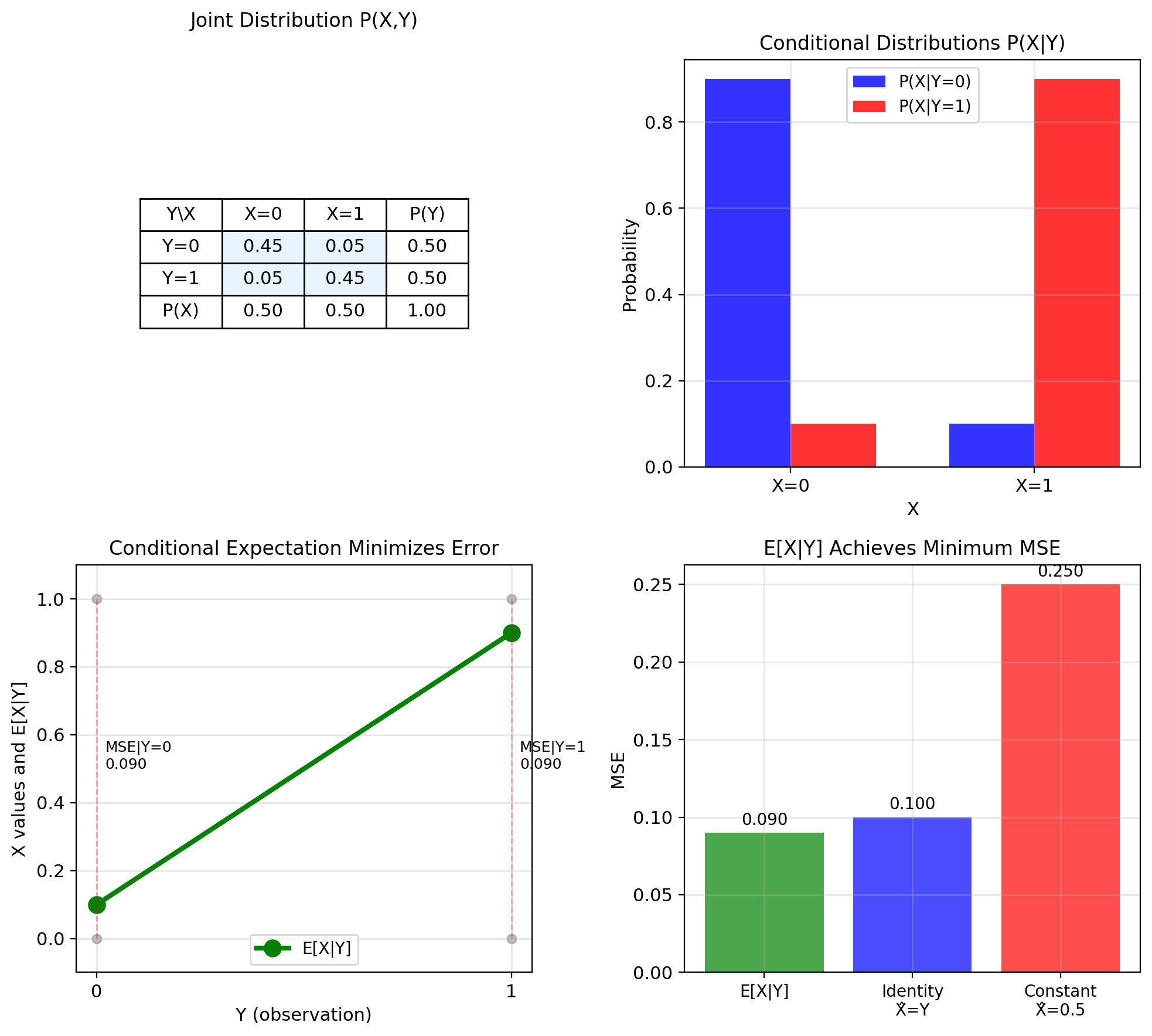
Binary Channel: E[X|Y] Achieves Minimum MSE
Example: Binary communication channel
- \(X \in \{0, 1\}\): transmitted bit
- \(Y \in \{0, 1\}\): received bit
- Channel flips bit with probability \(p = 0.1\)
Joint distribution: \[P(X=0, Y=0) = 0.45, \quad P(X=1, Y=0) = 0.05\] \[P(X=0, Y=1) = 0.05, \quad P(X=1, Y=1) = 0.45\]
Conditional distributions: \[P(X=0|Y=0) = \frac{0.45}{0.5} = 0.9\] \[P(X=1|Y=0) = \frac{0.05}{0.5} = 0.1\]
Conditional expectations: \[\mathbb{E}[X|Y=0] = 0 \cdot 0.9 + 1 \cdot 0.1 = 0.1\] \[\mathbb{E}[X|Y=1] = 0 \cdot 0.1 + 1 \cdot 0.9 = 0.9\]
MSE for different predictors:
- \(\hat{X} = \mathbb{E}[X|Y]\): MSE = 0.09
- \(\hat{X} = Y\) (identity): MSE = 0.10
- \(\hat{X} = 0.5\) (constant): MSE = 0.25
Result: \(\mathbb{E}[X|Y]\) achieves minimum MSE
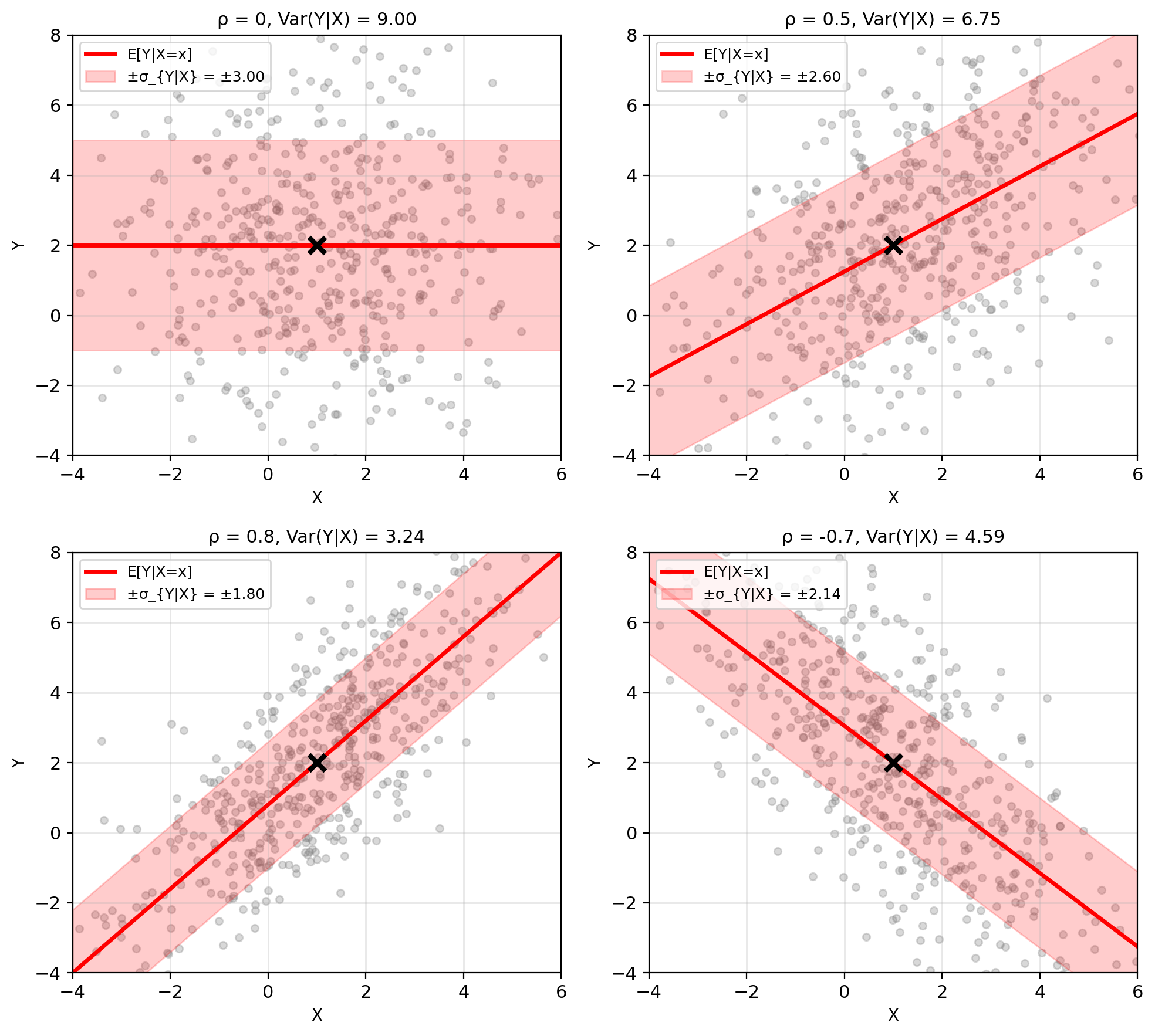
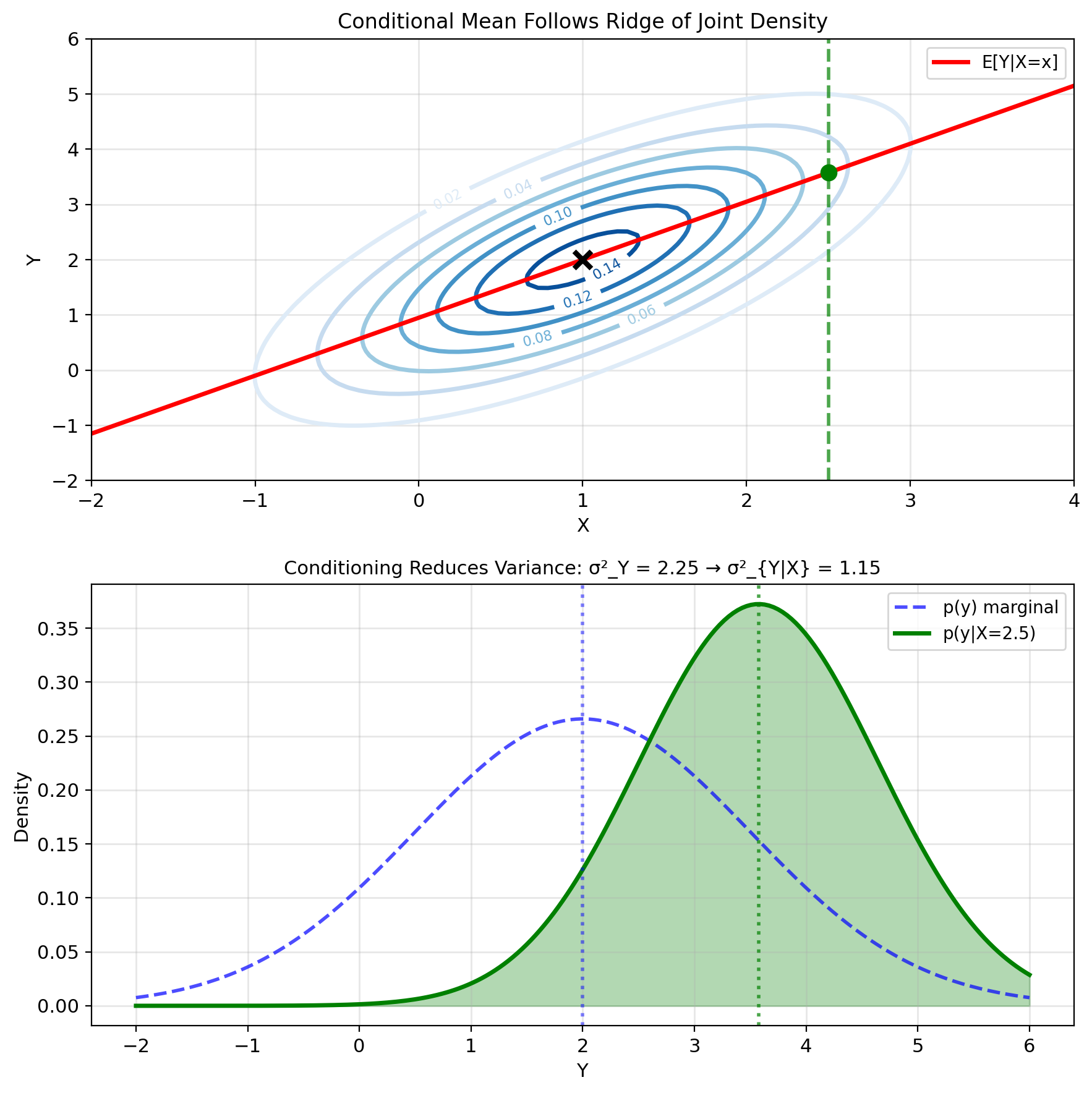
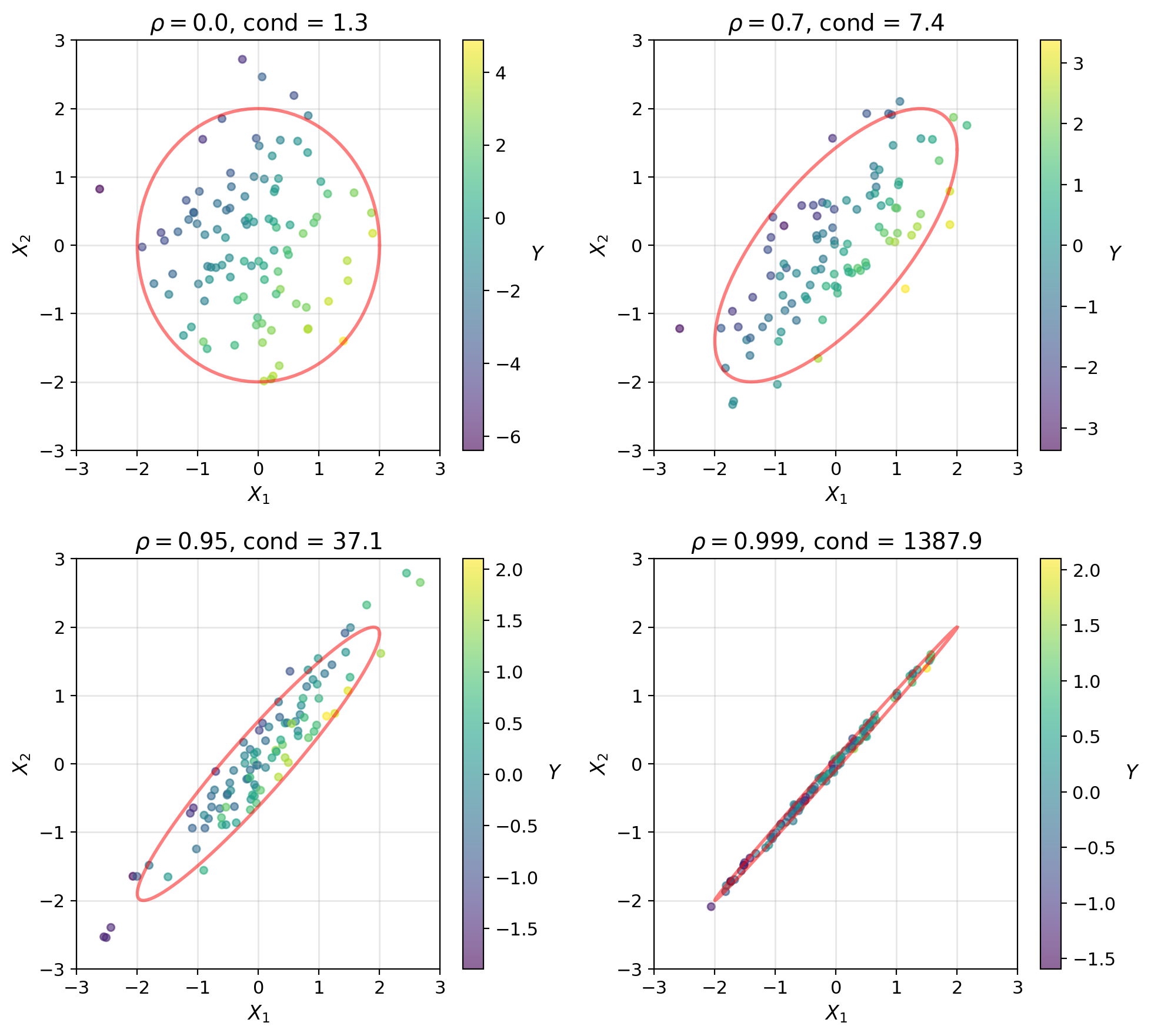
Gaussian Conditional Mean Is Linear in X
Joint Gaussian: \((X, Y) \sim \mathcal{N}(\mu, K)\)
Parameters: \[\mu = \begin{bmatrix} \mu_X \\ \mu_Y \end{bmatrix}, \quad K = \begin{bmatrix} \sigma_X^2 & \rho\sigma_X\sigma_Y \\ \rho\sigma_X\sigma_Y & \sigma_Y^2 \end{bmatrix}\]
Result (derive later): \[\mathbb{E}[Y|X=x] = \mu_Y + \rho\frac{\sigma_Y}{\sigma_X}(x - \mu_X)\]
Properties:
- Linear in \(x\) (always!)
- Slope = \(\rho\sigma_Y/\sigma_X\)
- Passes through \((\mu_X, \mu_Y)\)
- \(|\rho| = 1 \Rightarrow\) perfect prediction
Conditional variance (constant!): \[\text{Var}(Y|X=x) = \sigma_Y^2(1 - \rho^2)\]
Independent of \(x\) - uncertainty same everywhere.
Special cases:
- \(\rho = 0\): \(\mathbb{E}[Y|X=x] = \mu_Y\) (no information)
- \(|\rho| = 1\): \(\text{Var}(Y|X) = 0\) (perfect prediction)
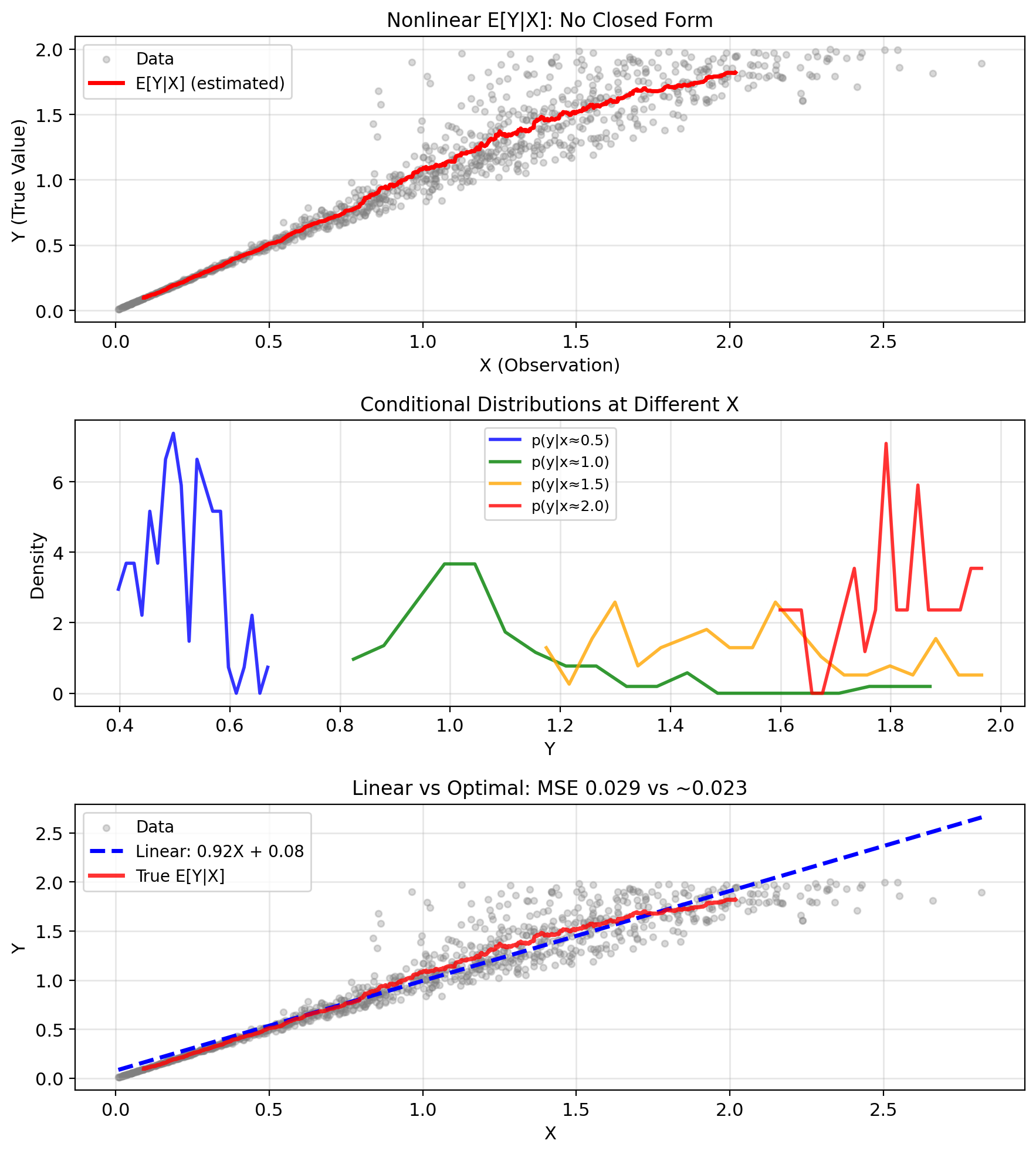
E[Y|X] Requires the Conditional Density
Computing \(\mathbb{E}[Y|X=x]\) requires \(p(y|x)\)
From Bayes: \[p(y|x) = \frac{p(x,y)}{p(x)} = \frac{p(x|y)p(y)}{\int p(x|y')p(y')dy'}\]
When tractable:
- Known parametric families (Gaussian, exponential)
- Discrete with small state space
- Special structures (independence, Markov)
When intractable (often no closed form):
- Complex nonlinear relationships
- High dimensions
- Unknown distributions
Example: Nonlinear sensor \[Y = \text{true value}, \quad X = Y + Y^2 \cdot N\] where \(N \sim \mathcal{N}(0, 0.1)\)
Computing \(\mathbb{E}[Y|X=x]\) requires:
- Joint density \(p(x,y)\)
- Marginal \(p(x) = \int p(x,y)dy\)
- Conditional \(p(y|x) = p(x,y)/p(x)\)
- Integration \(\mathbb{E}[Y|X=x] = \int y p(y|x) dy\)
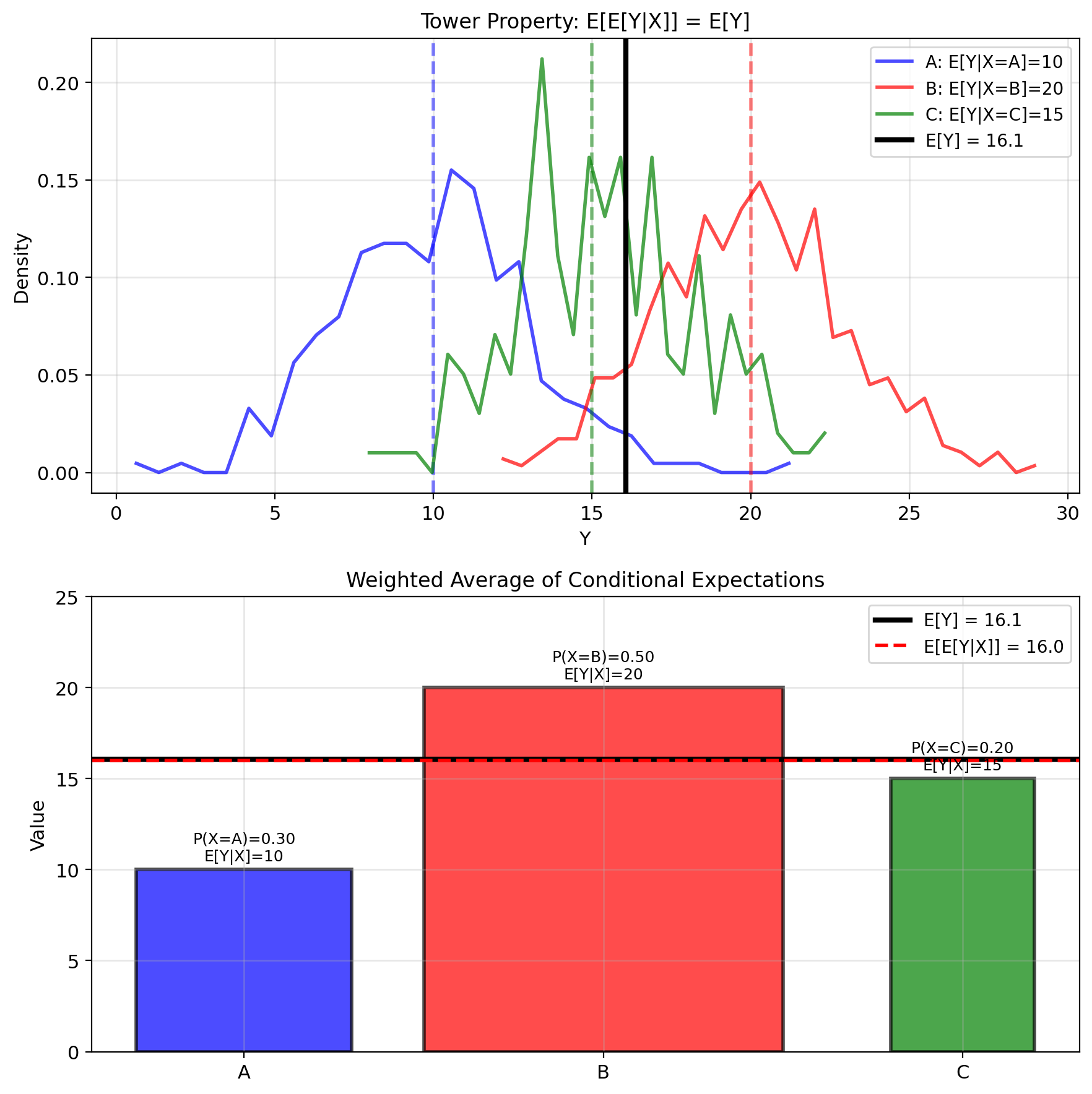
Iterated Expectations Recover the Mean
Law of Total Expectation: \[\mathbb{E}[\mathbb{E}[Y|X]] = \mathbb{E}[Y]\]
Proof: \[\mathbb{E}[\mathbb{E}[Y|X]] = \mathbb{E}[g(X)]\] where \(g(x) = \mathbb{E}[Y|X=x]\)
\[= \int g(x) p(x) dx = \int \mathbb{E}[Y|X=x] p(x) dx\]
\[= \int \left(\int y \, p(y|x) dy\right) p(x) dx\]
\[= \int\int y \, p(y|x) p(x) dy \, dx\]
\[= \int y \left(\int p(y|x)p(x) dx\right) dy\]
\[= \int y \, p(y) dy = \mathbb{E}[Y]\]
Intuition: Average of conditional averages = unconditional average
Example: Class grades
- Section A: mean 85, 30 students
- Section B: mean 75, 20 students
- Overall mean = \(\frac{30 \cdot 85 + 20 \cdot 75}{50} = 81\)
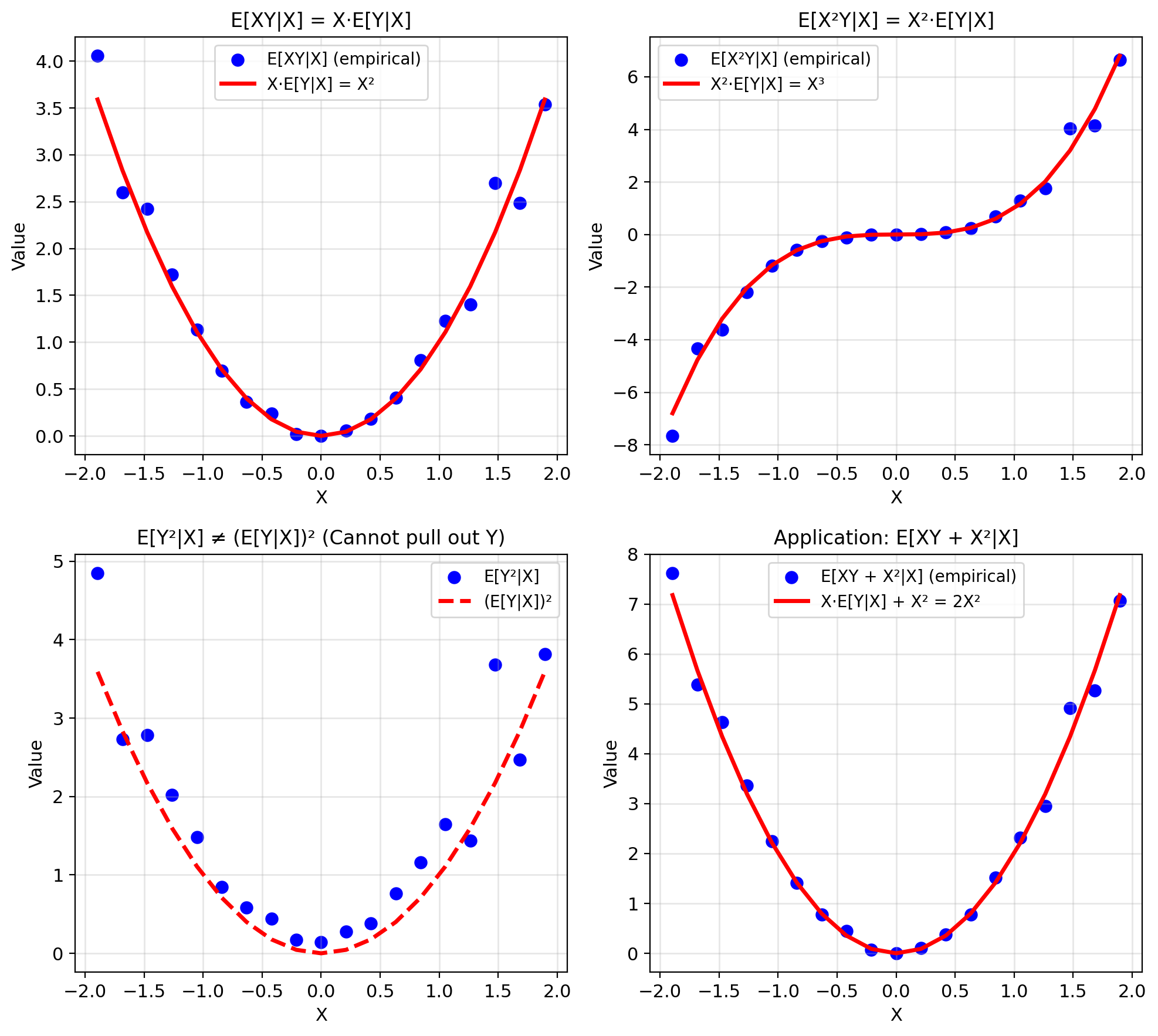
Functions of X Factor Out
Property: For any function \(h(X)\): \[\mathbb{E}[h(X)Y | X] = h(X)\mathbb{E}[Y|X]\]
Proof: Fix \(X = x\). Then \(h(X) = h(x)\) is a constant: \[\mathbb{E}[h(X)Y | X=x] = \mathbb{E}[h(x)Y | X=x]\] \[= h(x)\mathbb{E}[Y | X=x]\]
Special cases:
- \(\mathbb{E}[X \cdot Y | X] = X \cdot \mathbb{E}[Y|X]\)
- \(\mathbb{E}[f(X) + Y | X] = f(X) + \mathbb{E}[Y|X]\)
- \(\mathbb{E}[X^2Y | X] = X^2\mathbb{E}[Y|X]\)
Example: Signal processing \[Z = X \cdot Y + X^2\] \[\mathbb{E}[Z|X] = X\mathbb{E}[Y|X] + X^2\]
Only need \(\mathbb{E}[Y|X]\), not \(\mathbb{E}[XY|X]\)!
BUT: Cannot pull out functions of \(Y\): \[\mathbb{E}[Y^2|X] \neq Y \cdot \mathbb{E}[Y|X]\]
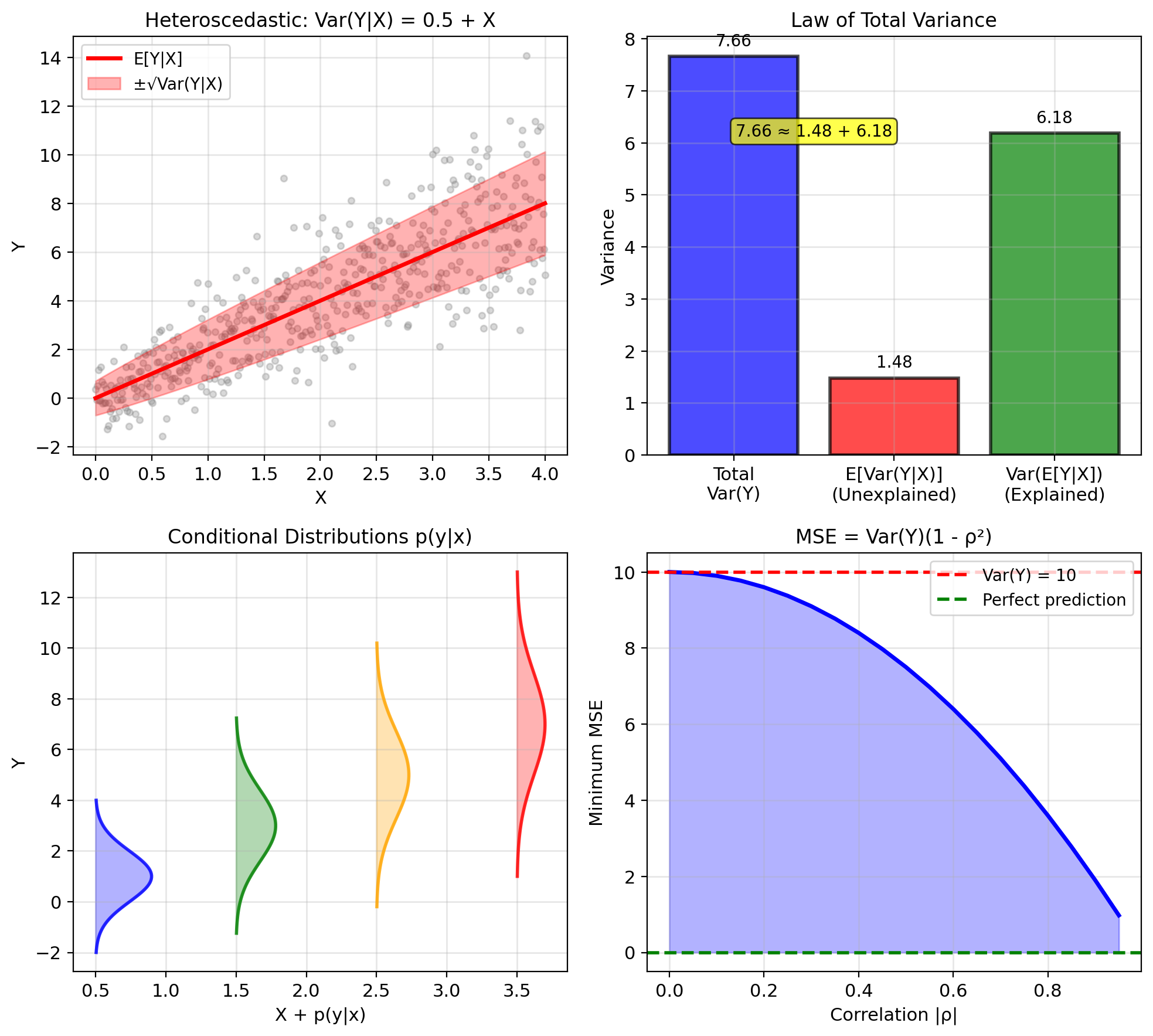
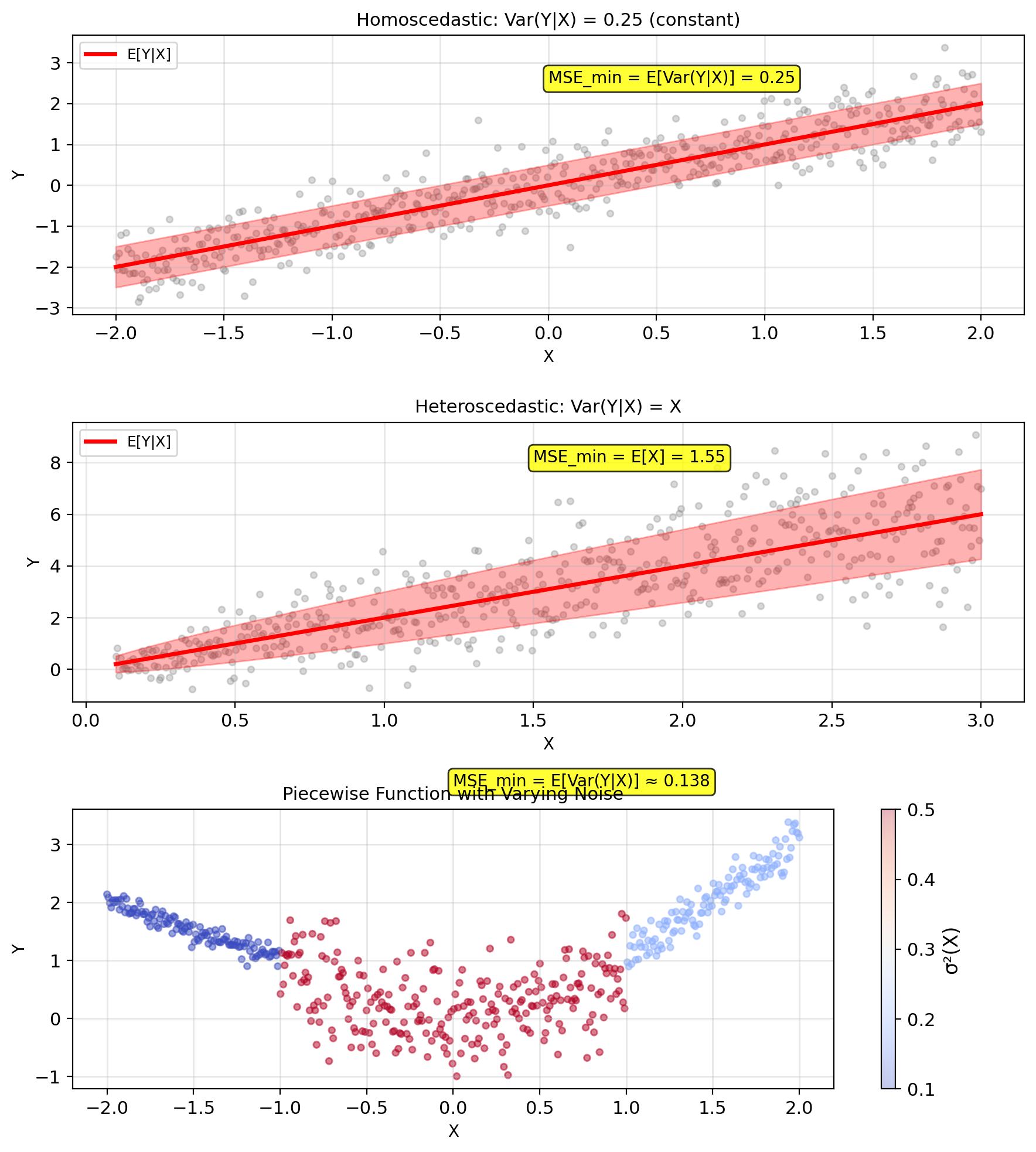
Var(Y|X) Is Irreducible Uncertainty
Definition: \[\text{Var}(Y|X) = \mathbb{E}[(Y - \mathbb{E}[Y|X])^2 | X]\]
Computing formula: \[\text{Var}(Y|X) = \mathbb{E}[Y^2|X] - (\mathbb{E}[Y|X])^2\]
Measures remaining uncertainty after observing \(X\)
Law of Total Variance: \[\text{Var}(Y) = \mathbb{E}[\text{Var}(Y|X)] + \text{Var}(\mathbb{E}[Y|X])\]
- First term: Average conditional variance (irreducible)
- Second term: Variance of conditional means (explained)
Interpretation: \[\text{Total uncertainty} = \text{Unexplained} + \text{Explained by } X\]
Minimum MSE: \[\text{MSE}_{\text{min}} = \mathbb{E}[(Y - \mathbb{E}[Y|X])^2] = \mathbb{E}[\text{Var}(Y|X)]\]
Cannot do better than conditional variance!
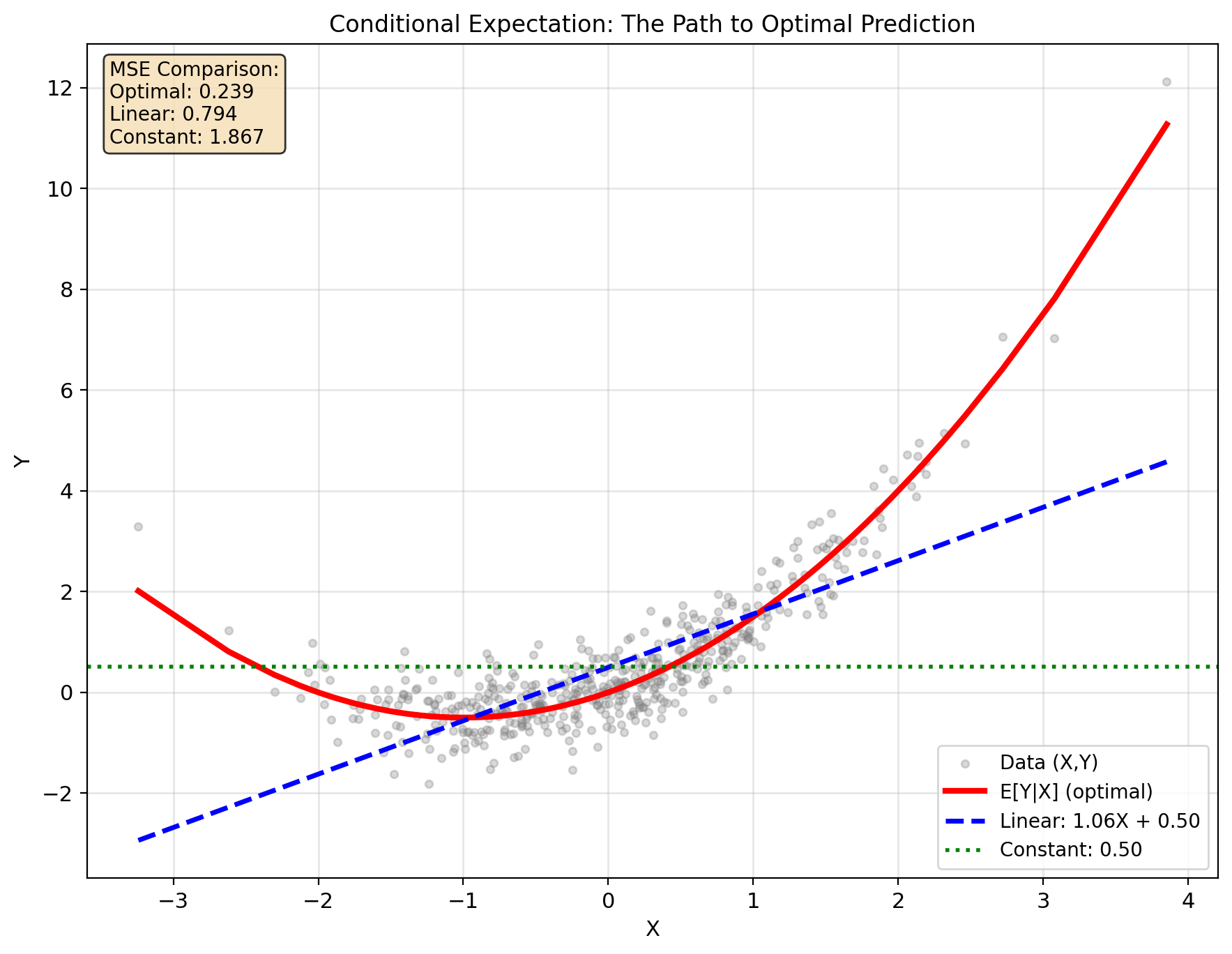
E[Y|X] Minimizes MSE Over All Functions
(prove next):
Among all functions \(g: \mathbb{R} \to \mathbb{R}\): \[\mathbb{E}[Y|X] = \arg\min_{g} \mathbb{E}[(Y - g(X))^2]\]
Achieving minimum MSE: \[\text{MSE}_{\text{min}} = \mathbb{E}[\text{Var}(Y|X)]\]
i.e., cannot beat the average conditional variance.
Why conditional expectation?
For fixed \(X = x\), minimizing \(\mathbb{E}[(Y - c)^2|X=x]\) over constants \(c\) yields: \[c^* = \mathbb{E}[Y|X=x]\]
Do this for each \(x\) → optimal function is \(g(x) = \mathbb{E}[Y|X=x]\)
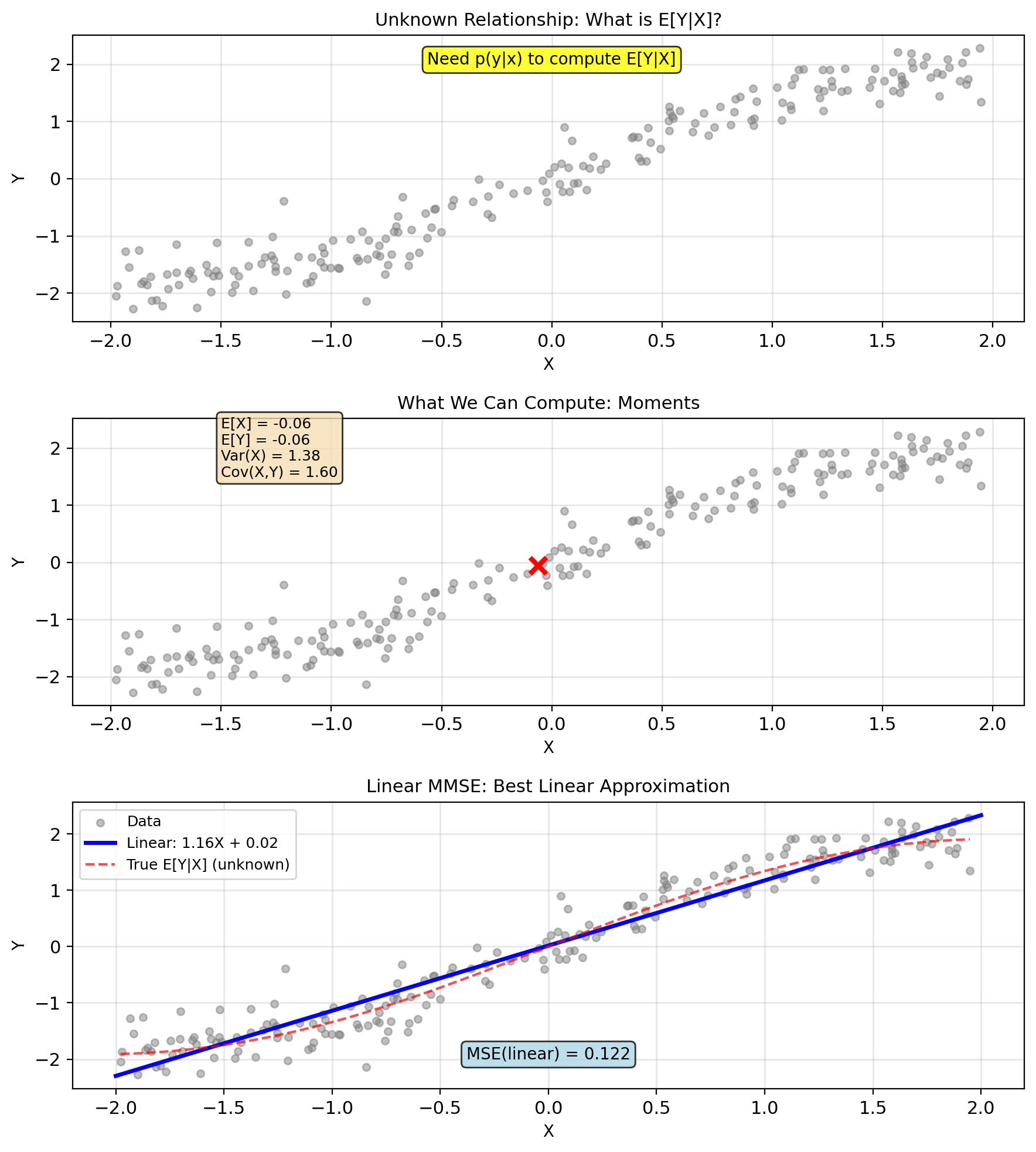
Computational reality:
- Need \(p(y|x)\) to compute \(\mathbb{E}[Y|X=x] = \int y p(y|x) dy\)
- Gaussian: Closed form (linear!)
- General: Often intractable
Constraints simplify the problem.
MMSE Optimizes Over All Measurable Functions
Goal: Find the best predictor of \(Y\) given \(X\)
Function space: \[\mathcal{G} = \{g: \mathbb{R} \to \mathbb{R} \text{ measurable}\}\]
Optimization problem: \[\min_{g \in \mathcal{G}} \text{MSE}(g) = \min_{g \in \mathcal{G}} \mathbb{E}[(Y - g(X))^2]\]
Infinite-dimensional optimization
- Search over all possible functions
- No parametric form assumed
- Need functional analysis tools
Strategy: Decompose the problem by conditioning on \(X\)
- Fix \(X = x\), solve pointwise optimization
- Combine solutions for all \(x\)
- Verify global optimality
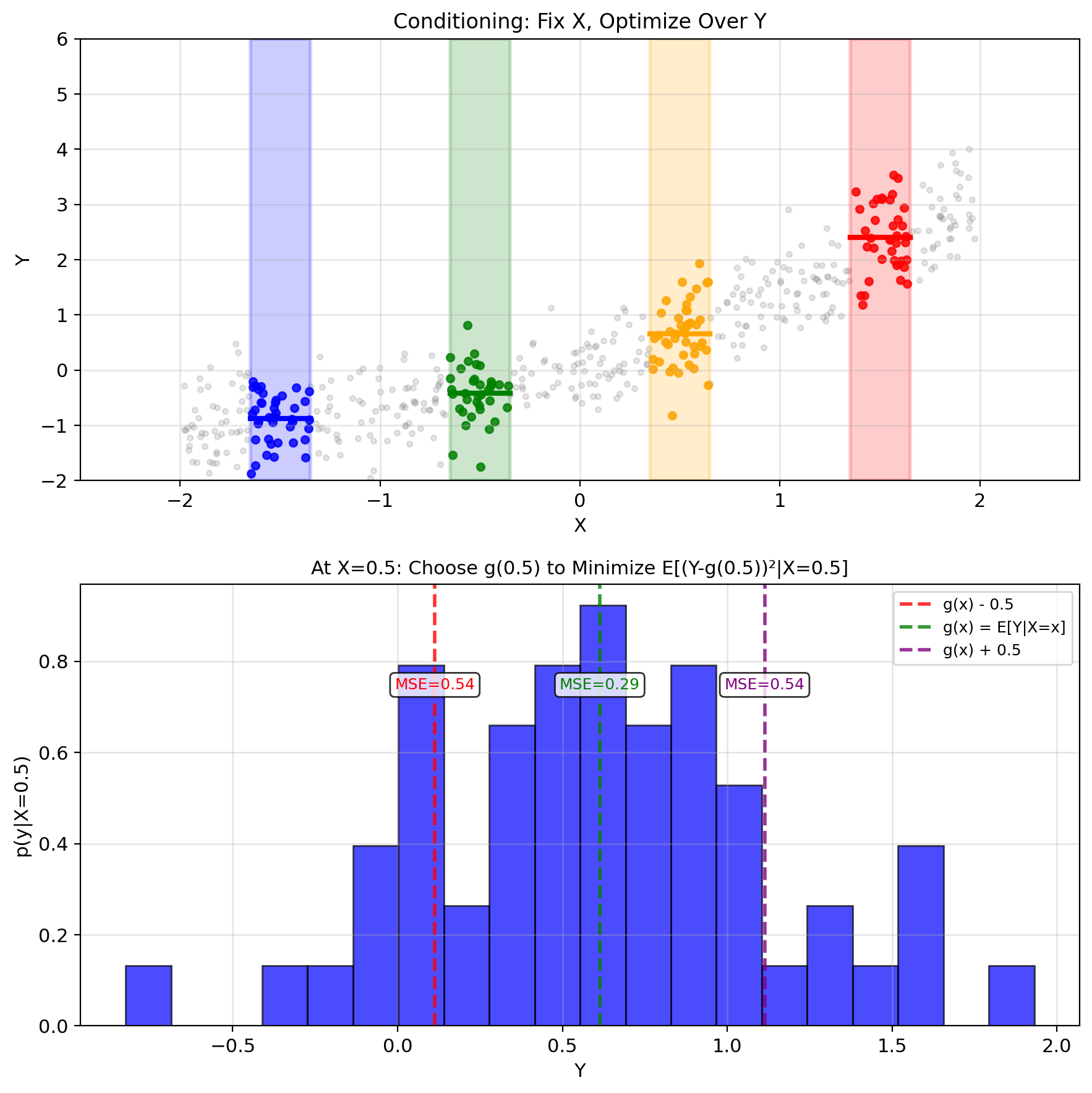
Conditioning Decomposes MSE into Subproblems
Decomposition: \[\text{MSE}(g) = \mathbb{E}[(Y - g(X))^2] = \mathbb{E}[\mathbb{E}[(Y - g(X))^2|X]]\]
Why this helps:
- Outside expectation: Average over \(X\)
- Inside expectation: For each fixed \(X = x\)
When \(X = x\) is fixed:
- \(g(X) = g(x)\) is just a number
- \(Y|X=x\) has distribution \(p(y|x)\)
- We minimize: \(\mathbb{E}[(Y - g(x))^2|X=x]\)
This transforms the problem:
- From: Find optimal function \(g\)
- To: For each \(x\), find optimal constant \(g(x)\)
Solution approach:
- Fix \(x\), find best constant predictor
- This gives us \(g^*(x)\) for each \(x\)
- The function \(g^*\) is our MMSE estimator
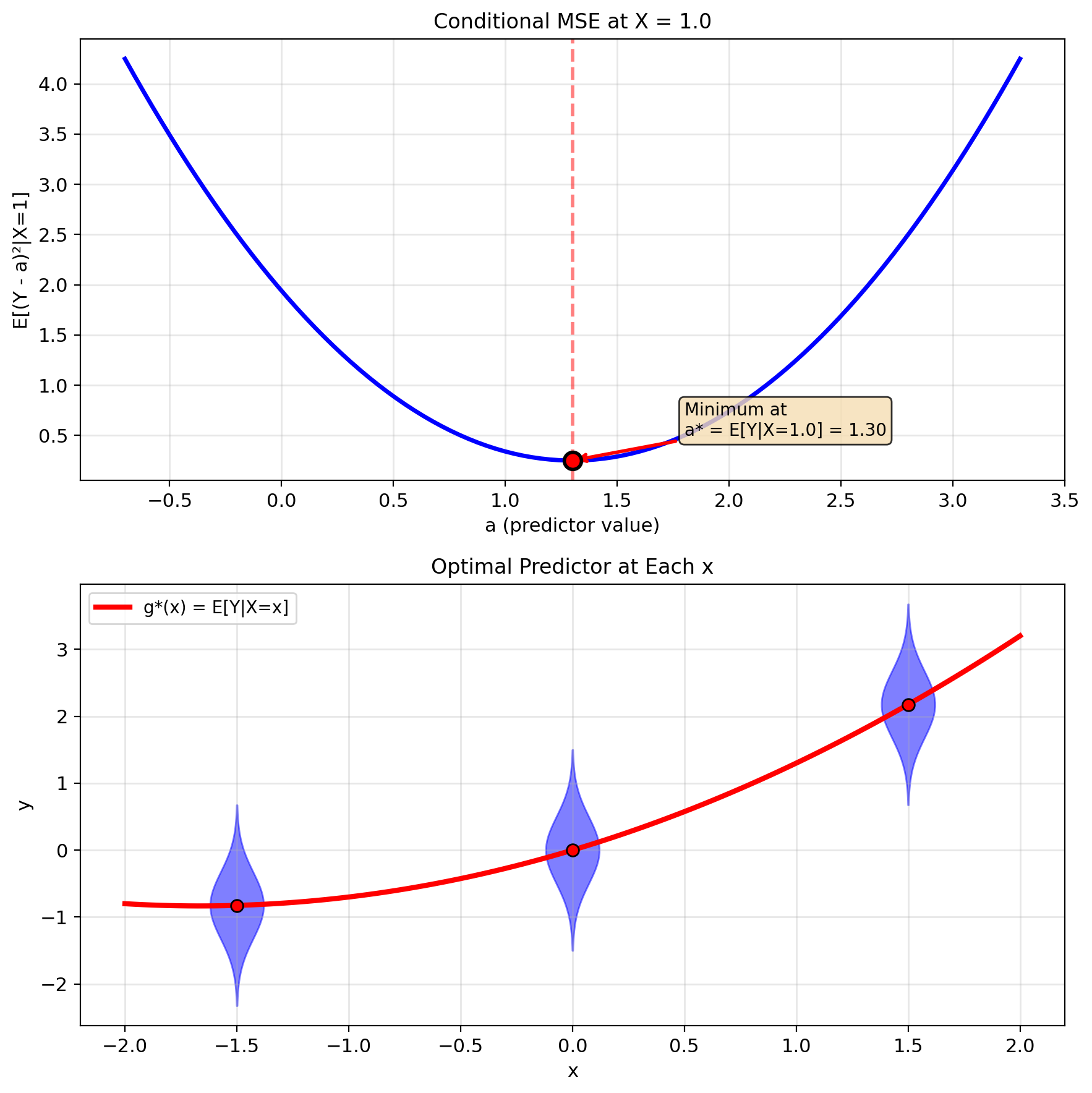
First-Order Condition Yields E[Y|X]
Step 1: Express MSE using conditional expectation \[\text{MSE}(g) = \mathbb{E}[(Y - g(X))^2]\] \[= \mathbb{E}[\mathbb{E}[(Y - g(X))^2|X]]\]
Step 2: For fixed \(X = x\), \(g(X) = g(x)\) is a constant \[\mathbb{E}[(Y - g(x))^2|X=x] = \mathbb{E}[(Y - a)^2|X=x]\] where \(a = g(x)\)
Step 3: Minimize over \(a\) \[\frac{d}{da}\mathbb{E}[(Y - a)^2|X=x] = 0\] \[-2\mathbb{E}[(Y - a)|X=x] = 0\] \[\mathbb{E}[Y|X=x] - a = 0\]
Solution: \(a^* = \mathbb{E}[Y|X=x]\)
Step 4: Since this holds for all \(x\): \[g^*(x) = \mathbb{E}[Y|X=x]\]
Therefore: \[\boxed{\hat{Y}_{\text{MMSE}} = \mathbb{E}[Y|X]}\]
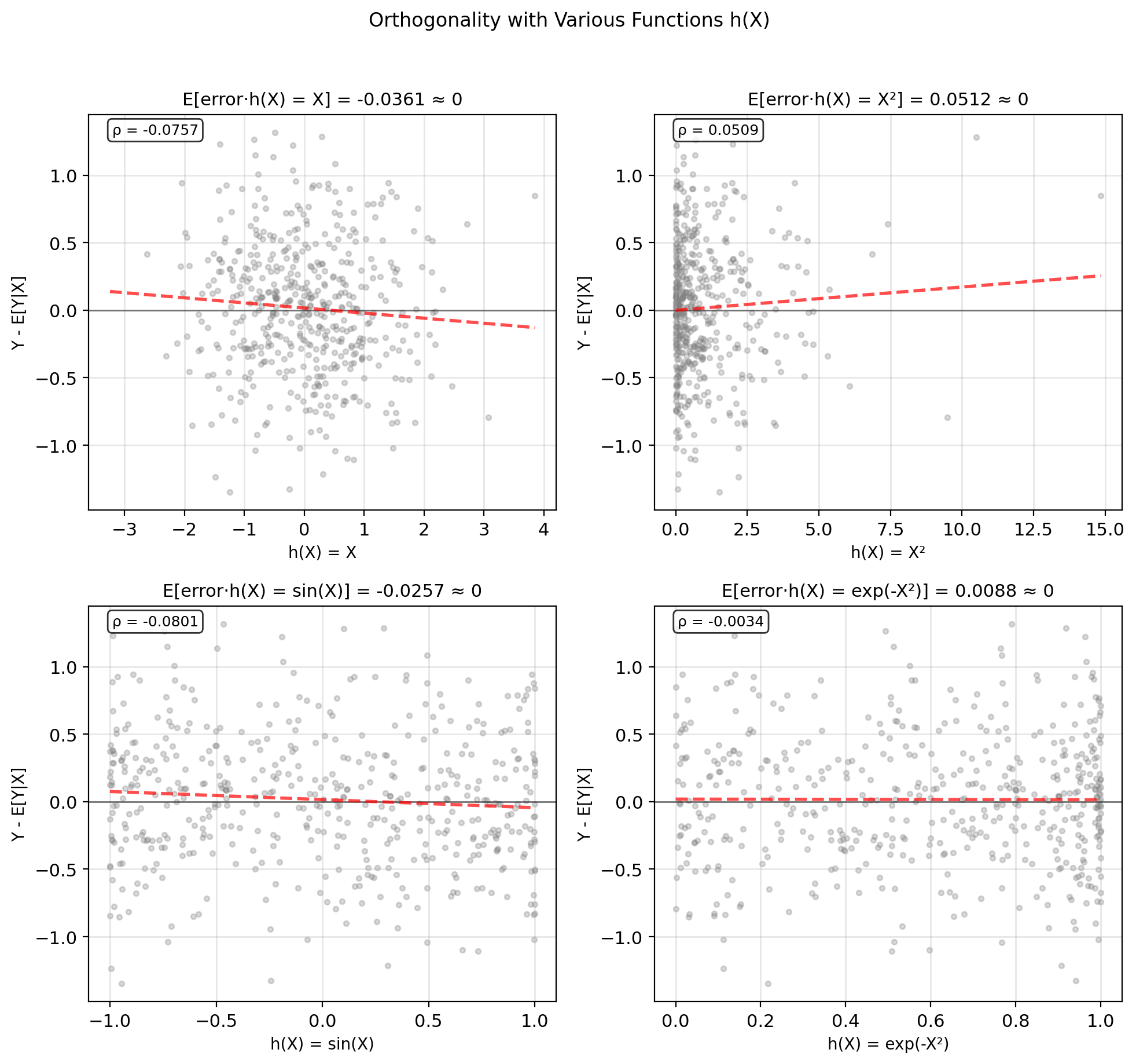
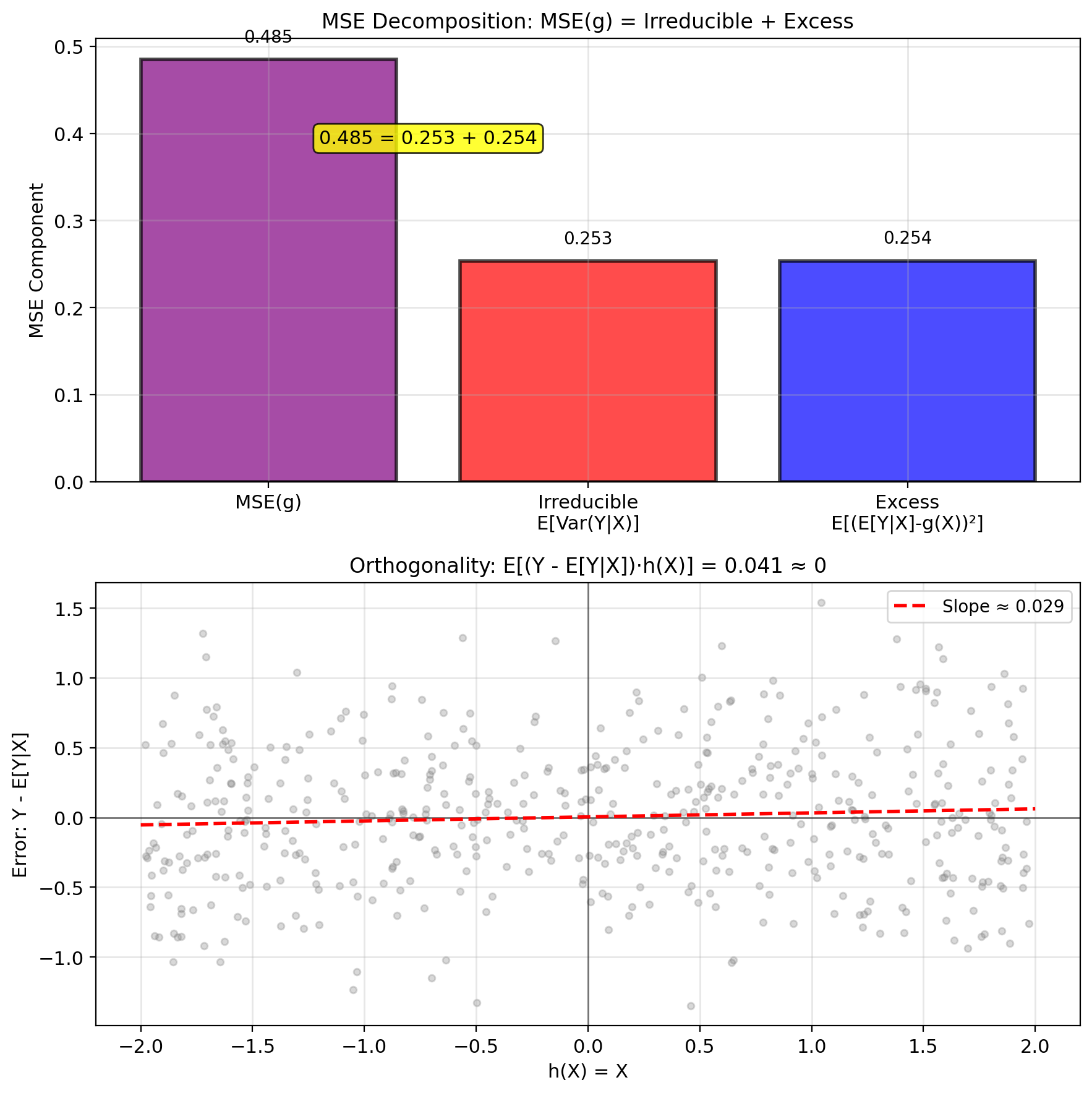
Optimal Error Is Uncorrelated with h(X)
Orthogonality principle: Optimal error orthogonal to any function of \(X\): \[\mathbb{E}[(Y - \mathbb{E}[Y|X])h(X)] = 0\] for any measurable \(h\).
Uniqueness: Only one function satisfies this → unique MMSE
Optimality test: If \(\mathbb{E}[\epsilon \cdot h(X)] \neq 0\), can reduce MSE by adjusting estimate in direction of \(h(X)\)
Computational foundation:
- Linear case → normal equations
- Adaptive filters → orthogonalize error
- Kalman filter → innovation orthogonality
Geometric meaning: MMSE = projection in Hilbert space
Proof: \(\mathbb{E}[(Y - \mathbb{E}[Y|X])|X] = 0\) by definition, multiplying by \(h(X)\) preserves this.
Cannot extract more information from \(X\)
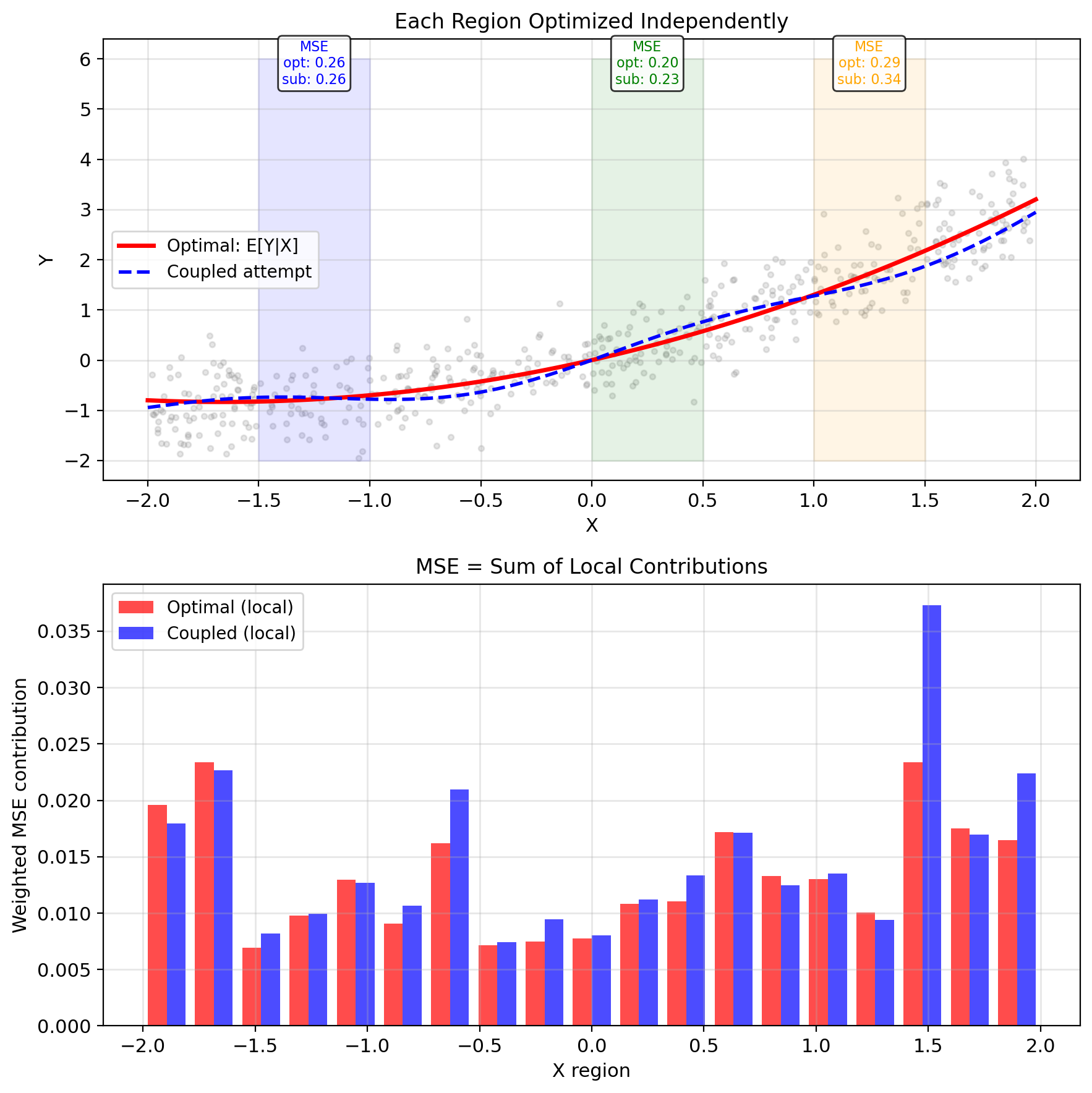
Pointwise Optimality Implies Global Optimality
We solved pointwise: For each \(x\), found \(g^*(x) = \mathbb{E}[Y|X=x]\)
Question: Is this globally optimal over all functions?
Two concerns:
- We optimized separately at each \(x\)
- Maybe coupling across different \(x\) values helps?
Key fact: MSE decomposes additively \[\text{MSE}(g) = \int \mathbb{E}[(Y - g(x))^2|X=x] p(x) dx\]
Each term \(\mathbb{E}[(Y - g(x))^2|X=x]\) depends only on \(g(x)\), not on \(g(x')\) for \(x' \neq x\).
Therefore:
- Minimizing each term separately minimizes the sum
- No coupling can improve the solution
- Pointwise optimization = Global optimization
Idea: Prediction at \(x\) doesn’t help prediction at \(x'\)
Suboptimal Predictors Add Excess MSE
Claim: No function can beat \(\mathbb{E}[Y|X]\)
Proof: For any function \(g\): \[\text{MSE}(g) = \mathbb{E}[(Y - g(X))^2]\]
Add and subtract \(\mathbb{E}[Y|X]\): \[= \mathbb{E}[(Y - \mathbb{E}[Y|X] + \mathbb{E}[Y|X] - g(X))^2]\]
Expand the square: \[= \mathbb{E}[(Y - \mathbb{E}[Y|X])^2] + \mathbb{E}[(\mathbb{E}[Y|X] - g(X))^2]\] \[+ 2\mathbb{E}[(Y - \mathbb{E}[Y|X])(\mathbb{E}[Y|X] - g(X))]\]
Key: The cross term is zero! \[\mathbb{E}[(Y - \mathbb{E}[Y|X])(\mathbb{E}[Y|X] - g(X))] = 0\]
Because \(\mathbb{E}[Y|X] - g(X)\) is a function of \(X\) and: \[\mathbb{E}[(Y - \mathbb{E}[Y|X])h(X)] = 0\] for any \(h(X)\) (orthogonality).
Therefore: \[\text{MSE}(g) = \text{MSE}_{\min} + \mathbb{E}[(\mathbb{E}[Y|X] - g(X))^2] \geq \text{MSE}_{\min}\]
Theorem: E[Y|X] Is the MMSE Estimator
Theorem: Let \((X, Y)\) have \(\mathbb{E}[Y^2] < \infty\). Then: \[\boxed{\hat{Y}_{\text{MMSE}} = \mathbb{E}[Y|X] = \arg\min_{g} \mathbb{E}[(Y - g(X))^2]}\]
Proof:
1. Decompose by conditioning: \[\text{MSE}(g) = \mathbb{E}[(Y - g(X))^2] = \mathbb{E}\bigl[\mathbb{E}[(Y - g(X))^2 | X]\bigr]\]
2. Solve pointwise: For fixed \(X = x\), minimize over constant \(c\): \[\frac{d}{dc}\mathbb{E}[(Y - c)^2 | X = x] = -2\mathbb{E}[Y - c | X = x] = 0\] \[\implies c^* = \mathbb{E}[Y | X = x]\]
3. Global optimality: MSE decomposes additively over \(x\). Each term minimized separately \(\implies\) sum minimized.
4. Orthogonality: Error \(\varepsilon = Y - \mathbb{E}[Y|X]\) satisfies: \[\mathbb{E}[\varepsilon \cdot h(X)] = 0 \quad \text{for all } h\]
This uniquely characterizes the solution.
5. Minimum MSE: \[\boxed{\text{MSE}_{\min} = \mathbb{E}[\text{Var}(Y|X)]}\]
MSE\(_{\min}\) = \(\mathbb{E}[\text{Var}(Y|X)]\)
Minimum achievable MSE: \[\text{MSE}_{\min} = \mathbb{E}[(Y - \mathbb{E}[Y|X])^2]\]
Result: \[\boxed{\text{MSE}_{\min} = \mathbb{E}[\text{Var}(Y|X)]}\]
Proof: \[\text{MSE}_{\min} = \mathbb{E}[(Y - \mathbb{E}[Y|X])^2]\] \[= \mathbb{E}[\mathbb{E}[(Y - \mathbb{E}[Y|X])^2|X]]\]
For fixed \(X = x\): \[\mathbb{E}[(Y - \mathbb{E}[Y|X=x])^2|X=x] = \text{Var}(Y|X=x)\]
Therefore: \[\text{MSE}_{\min} = \mathbb{E}[\text{Var}(Y|X)]\]
- Cannot eliminate conditional variance
- Irreducible uncertainty
- Fundamental limit of prediction
Special cases:
- \(X\) and \(Y\) independent: \(\text{MSE}_{\min} = \text{Var}(Y)\)
- \(Y = f(X)\) deterministic: \(\text{MSE}_{\min} = 0\)
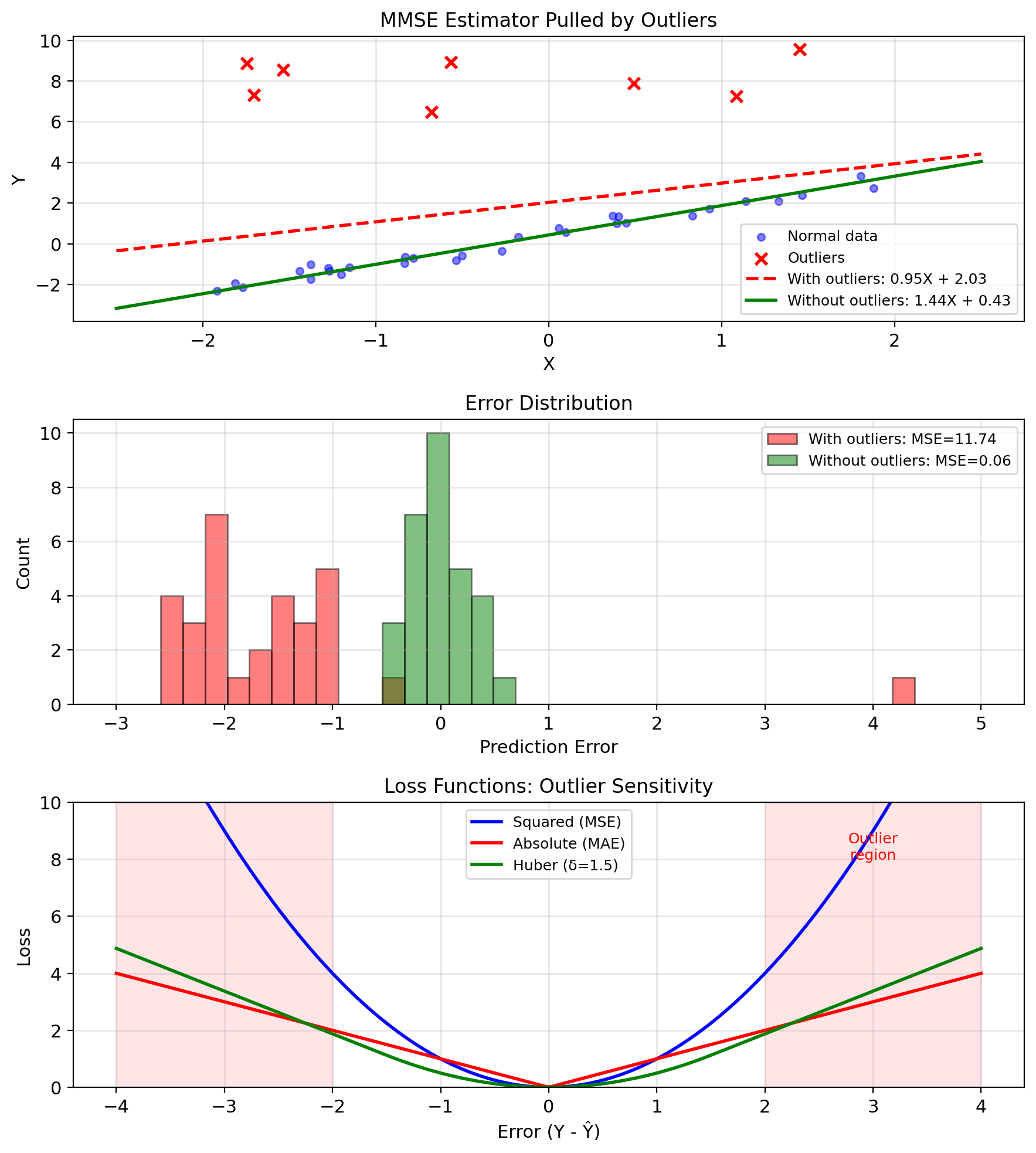
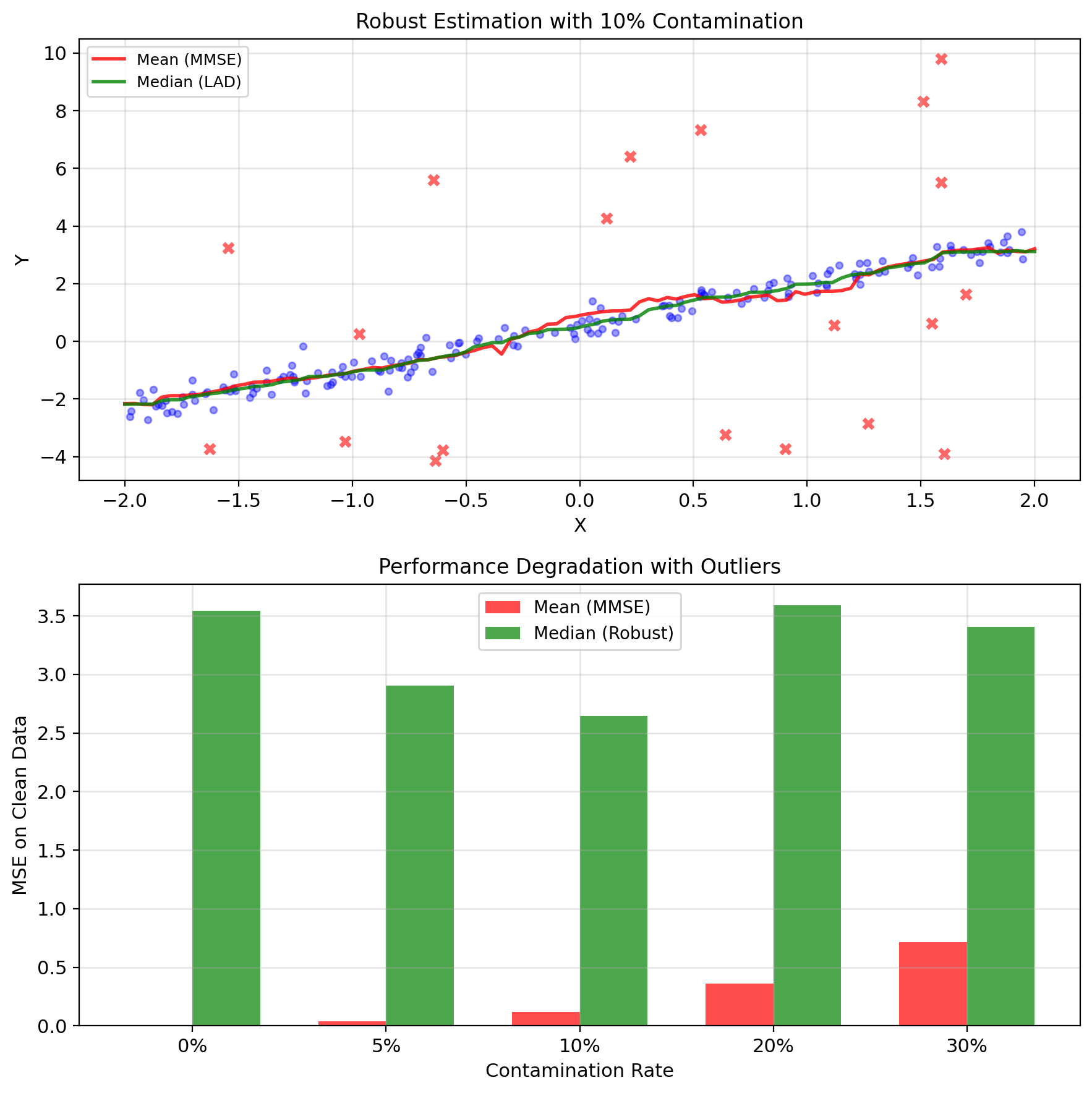
Squared Error Makes MMSE Outlier-Sensitive
Squared error is sensitive to outliers
Single outlier can dominate MSE: \[\text{MSE} = \frac{1}{n}\sum_{i=1}^n (y_i - \hat{y}_i)^2\]
If \(y_k\) is outlier: \((y_k - \hat{y}_k)^2 \gg (y_i - \hat{y}_i)^2\) for \(i \neq k\)
Effect on MMSE:
- \(\mathbb{E}[Y|X]\) gets pulled toward outliers
- Large increase in MSE
- Solution may not represent majority of data
Example: Sensor failure
- 99 readings: \(Y \approx X + \varepsilon\), \(\varepsilon \sim \mathcal{N}(0, 0.1^2)\)
- 1 reading: \(Y = 100\) (sensor spike)
MMSE tries to accommodate the outlier, degrading performance for typical cases.
Alternative loss functions:
- Absolute error: \(|Y - \hat{Y}|\) (median)
- Huber loss: Quadratic for small errors, linear for large
- Trimmed MSE: Ignore largest errors
Median Regression Is Robust to Outliers
When outliers are present:
Median regression (LAD): \[\min_g \mathbb{E}[|Y - g(X)|]\] Solution: \(g^*(x) = \text{median}(Y|X=x)\)
Huber regression: \[\min_g \mathbb{E}[\ell_\delta(Y - g(X))]\] where \(\ell_\delta(e) = \begin{cases} \frac{1}{2}e^2 & |e| \leq \delta \\ \delta|e| - \frac{\delta^2}{2} & |e| > \delta \end{cases}\)
Trimmed mean: Remove top/bottom α% before computing \(\mathbb{E}[Y|X]\)
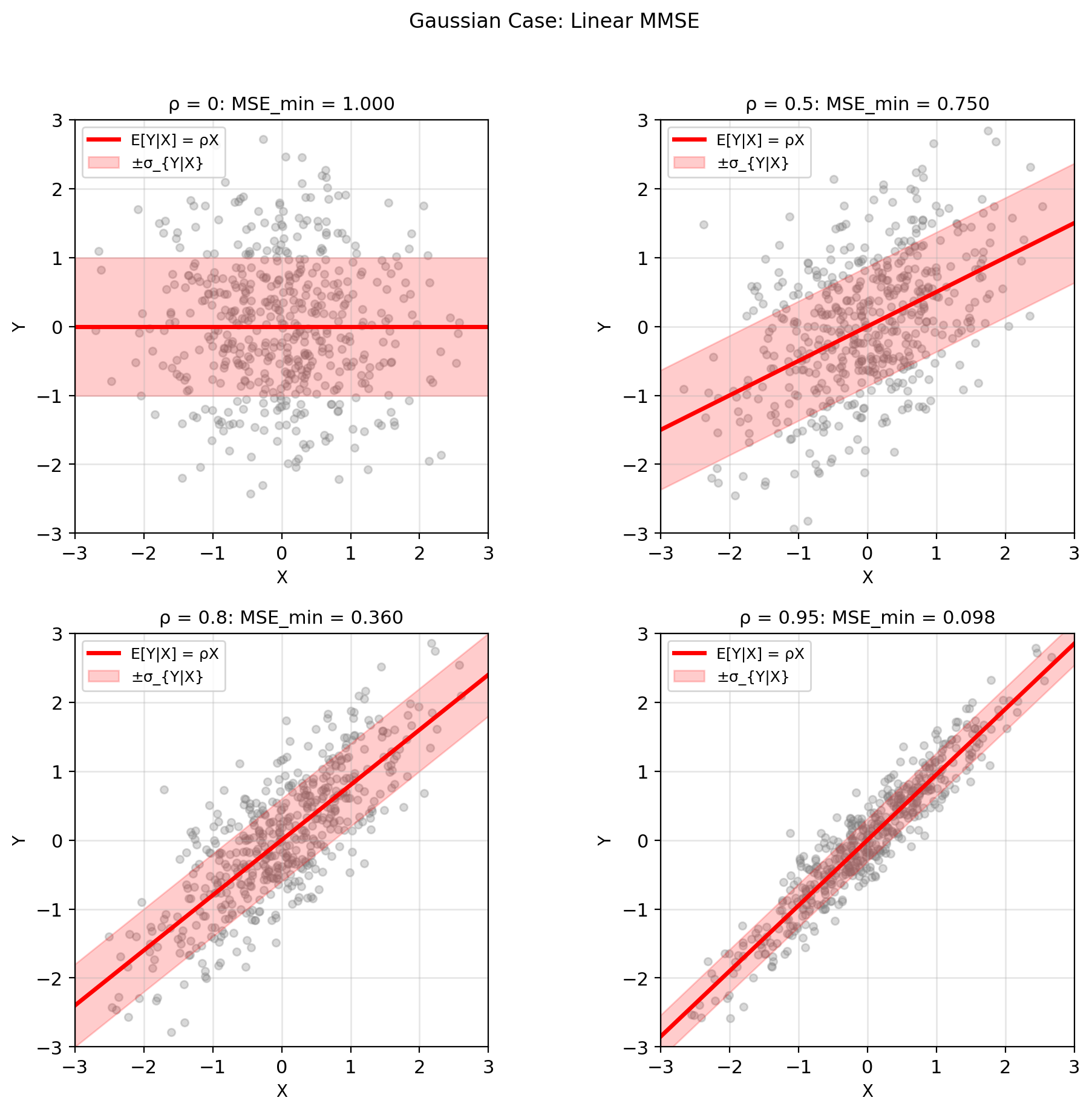
Gaussian: MSE = σ²(1 - ρ²)
Joint Gaussian: \((X, Y) \sim \mathcal{N}(\mu, K)\)
\[K = \begin{bmatrix} \sigma_X^2 & \rho\sigma_X\sigma_Y \\ \rho\sigma_X\sigma_Y & \sigma_Y^2 \end{bmatrix}\]
MMSE estimator: \[\hat{Y}_{\text{MMSE}} = \mathbb{E}[Y|X] = \mu_Y + \rho\frac{\sigma_Y}{\sigma_X}(X - \mu_X)\]
Key property: Linear in \(X\)!
Minimum MSE: \[\text{MSE}_{\min} = \mathbb{E}[\text{Var}(Y|X)] = \sigma_Y^2(1 - \rho^2)\]
Observations:
- \(\rho = 0\): MSE\(_{\min}\) = \(\sigma_Y^2\) (no improvement)
- \(|\rho| = 1\): MSE\(_{\min}\) = 0 (perfect prediction)
- Linear MMSE = Unrestricted MMSE
Why linear? Gaussian conditional \(Y|X\) has:
- Mean linear in \(x\)
- Variance independent of \(x\)
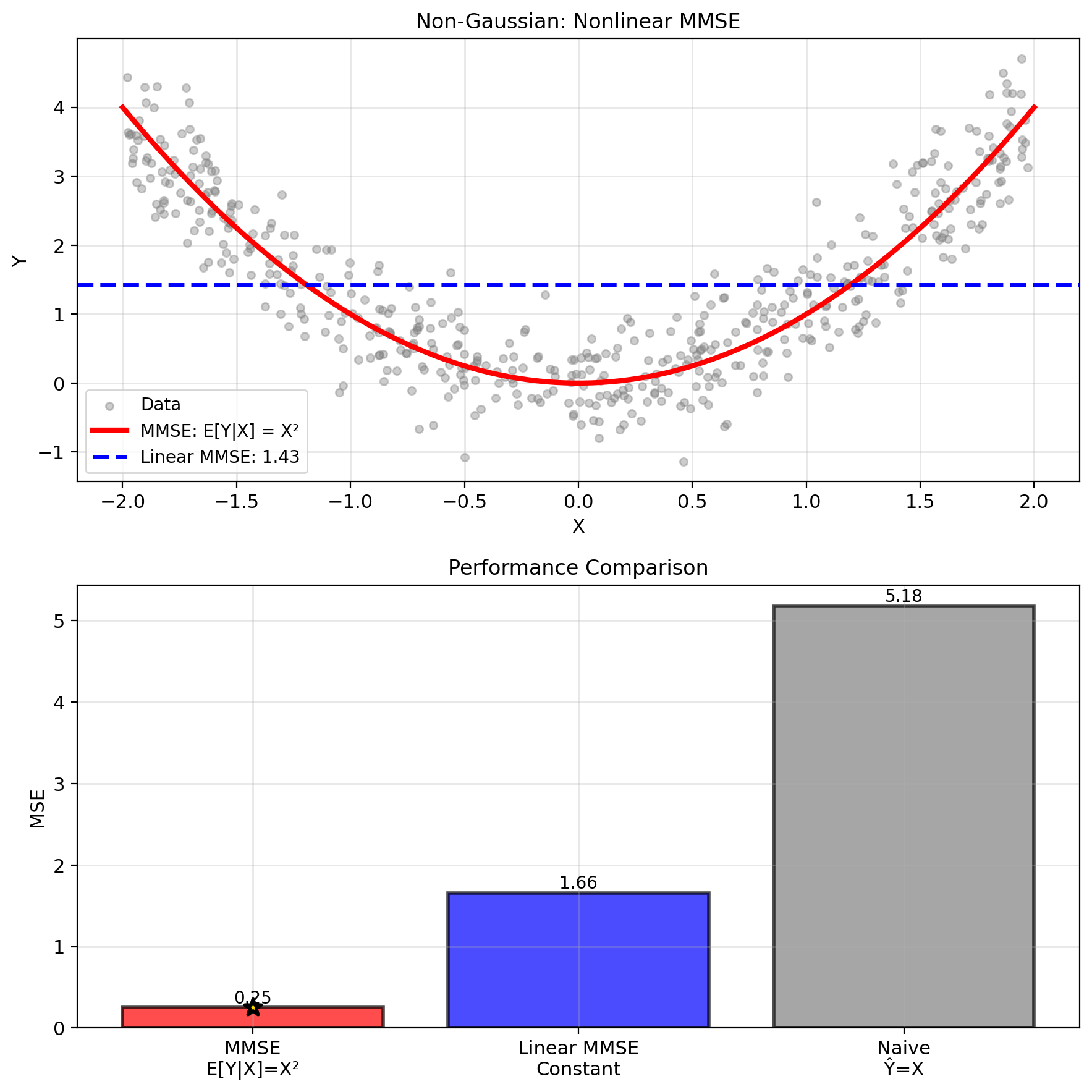
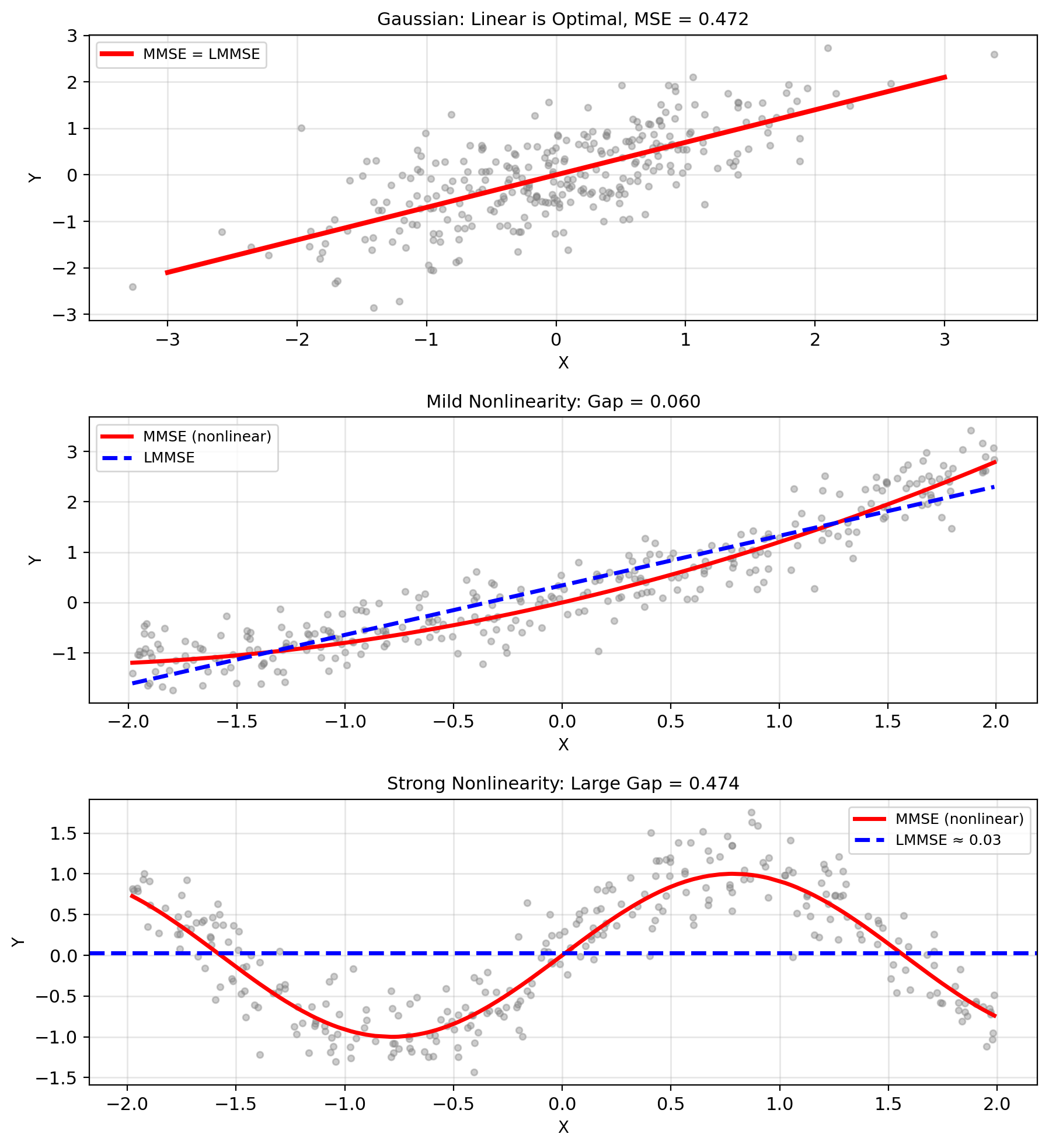
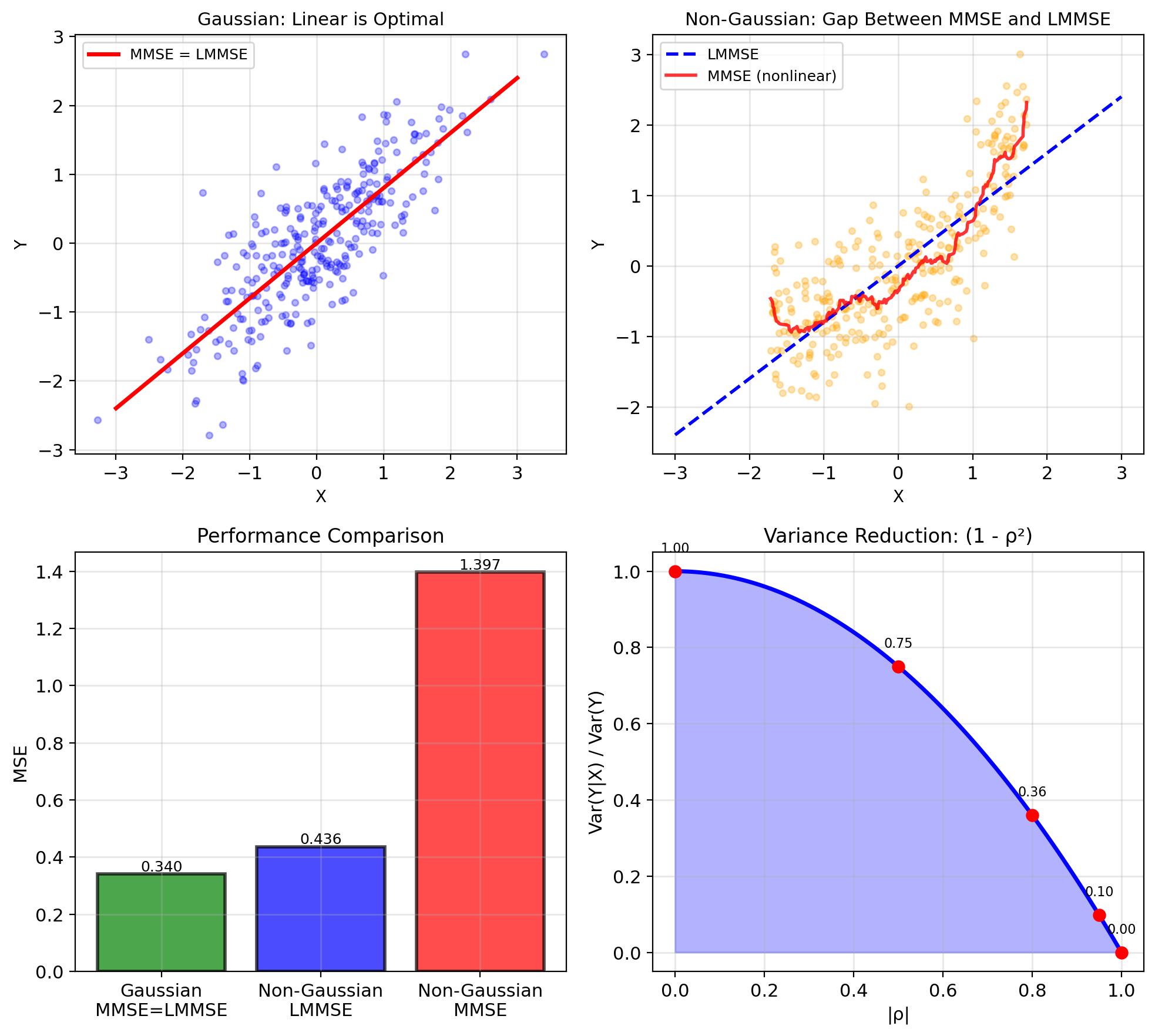
Nonlinear E[Y|X] Creates a Performance Gap
Uniform-Quadratic example:
- \(X \sim \text{Uniform}(-2, 2)\)
- \(Y = X^2 + N\), \(N \sim \mathcal{N}(0, 0.5^2)\)
MMSE estimator: \[\hat{Y}_{\text{MMSE}} = \mathbb{E}[Y|X] = X^2\]
NOTE: Nonlinear in \(X\)
Linear MMSE (suboptimal): \[\hat{Y}_{\text{linear}} = \mathbb{E}[Y] + \frac{\text{Cov}(X,Y)}{\text{Var}(X)}(X - \mathbb{E}[X])\]
Since \(\mathbb{E}[X] = 0\) and \(\text{Cov}(X,Y) = \mathbb{E}[X^3] = 0\): \[\hat{Y}_{\text{linear}} = \mathbb{E}[Y] = \mathbb{E}[X^2] = \frac{4}{3}\]
Performance gap:
- MSE\(_{\text{MMSE}}\) = \(\sigma_N^2\) = 0.25
- MSE\(_{\text{linear}}\) = Var(\(X^2\)) + \(\sigma_N^2\) ≈ 2.17
Linear loses significant performance when true relationship is nonlinear!
Inner Products Measure Alignment
Definition: For vectors \(\mathbf{x}, \mathbf{y} \in \mathbb{R}^n\) \[\langle \mathbf{x}, \mathbf{y} \rangle = \mathbf{x}^T\mathbf{y} = \sum_{i=1}^n x_i y_i\]
Geometric interpretation: \[\langle \mathbf{x}, \mathbf{y} \rangle = \|\mathbf{x}\| \|\mathbf{y}\| \cos\theta\]
where \(\theta\) is the angle between vectors.
Special cases:
- \(\theta = 0°\): \(\langle \mathbf{x}, \mathbf{y} \rangle = \|\mathbf{x}\|\|\mathbf{y}\|\) (aligned)
- \(\theta = 90°\): \(\langle \mathbf{x}, \mathbf{y} \rangle = 0\) (orthogonal)
- \(\theta = 180°\): \(\langle \mathbf{x}, \mathbf{y} \rangle = -\|\mathbf{x}\|\|\mathbf{y}\|\) (opposed)
Norm from inner product: \[\|\mathbf{x}\| = \sqrt{\langle \mathbf{x}, \mathbf{x} \rangle} = \sqrt{\sum_i x_i^2}\]
Projection Finds the Closest Point in a Subspace
Problem: Given \(\mathbf{y}\) and subspace \(\mathcal{S}\), find \(\hat{\mathbf{y}} \in \mathcal{S}\) that minimizes \[\|\mathbf{y} - \hat{\mathbf{y}}\|^2\]
Solution: \(\hat{\mathbf{y}} = \text{Proj}_{\mathcal{S}}(\mathbf{y})\)
Projection onto a line (1D subspace):
Given direction \(\mathbf{u}\) with \(\|\mathbf{u}\| = 1\): \[\hat{\mathbf{y}} = \langle \mathbf{y}, \mathbf{u} \rangle \mathbf{u}\]
Projection onto span of \(\{\mathbf{u}_1, \mathbf{u}_2\}\):
If \(\mathbf{u}_1 \perp \mathbf{u}_2\) and both unit vectors: \[\hat{\mathbf{y}} = \langle \mathbf{y}, \mathbf{u}_1 \rangle \mathbf{u}_1 + \langle \mathbf{y}, \mathbf{u}_2 \rangle \mathbf{u}_2\]
The error is what remains: \[\mathbf{e} = \mathbf{y} - \hat{\mathbf{y}}\]
Orthogonal Error = Minimum Distance
Theorem: \(\hat{\mathbf{y}}\) minimizes \(\|\mathbf{y} - \hat{\mathbf{y}}\|^2\) over \(\mathcal{S}\)
if and only if
\[(\mathbf{y} - \hat{\mathbf{y}}) \perp \mathcal{S}\]
Why orthogonality implies optimality:
Suppose error \(\mathbf{e} = \mathbf{y} - \hat{\mathbf{y}}\) is not orthogonal to \(\mathcal{S}\).
Then \(\mathbf{e}\) has a component along \(\mathcal{S}\).
Moving \(\hat{\mathbf{y}}\) in that direction reduces \(\|\mathbf{e}\|\).
Contradiction: \(\hat{\mathbf{y}}\) wasn’t optimal.
Orthogonality conditions:
For \(\mathcal{S} = \text{span}\{\mathbf{v}_1, ..., \mathbf{v}_k\}\): \[\langle \mathbf{y} - \hat{\mathbf{y}}, \mathbf{v}_i \rangle = 0 \quad \text{for } i = 1, ..., k\]
This gives \(k\) equations to solve for \(\hat{\mathbf{y}}\).

Projection onto Higher-Dimensional Subspaces
Matrix formulation:
Let columns of \(X\) span \(\mathcal{S}\): \[X = [\mathbf{x}_1 | \mathbf{x}_2 | \cdots | \mathbf{x}_p]\]
Projection: \(\hat{\mathbf{y}} = X\mathbf{a}\) for some coefficients \(\mathbf{a}\).
Orthogonality conditions: \[X^T(\mathbf{y} - X\mathbf{a}) = \mathbf{0}\]
Normal equations: \[X^TX\mathbf{a} = X^T\mathbf{y}\]
Solution (if \(X^TX\) invertible): \[\mathbf{a} = (X^TX)^{-1}X^T\mathbf{y}\]
Projection matrix: \[P = X(X^TX)^{-1}X^T\] \[\hat{\mathbf{y}} = P\mathbf{y}\]
Properties: \(P^2 = P\), \(P^T = P\)
Positive Definite Matrices Define Ellipsoids
Definition: \(A\) is positive definite if \[\mathbf{x}^T A \mathbf{x} > 0 \quad \text{for all } \mathbf{x} \neq \mathbf{0}\]
Equivalent conditions:
- All eigenvalues \(\lambda_i > 0\)
- \(A = B^TB\) for some invertible \(B\)
- All leading principal minors positive
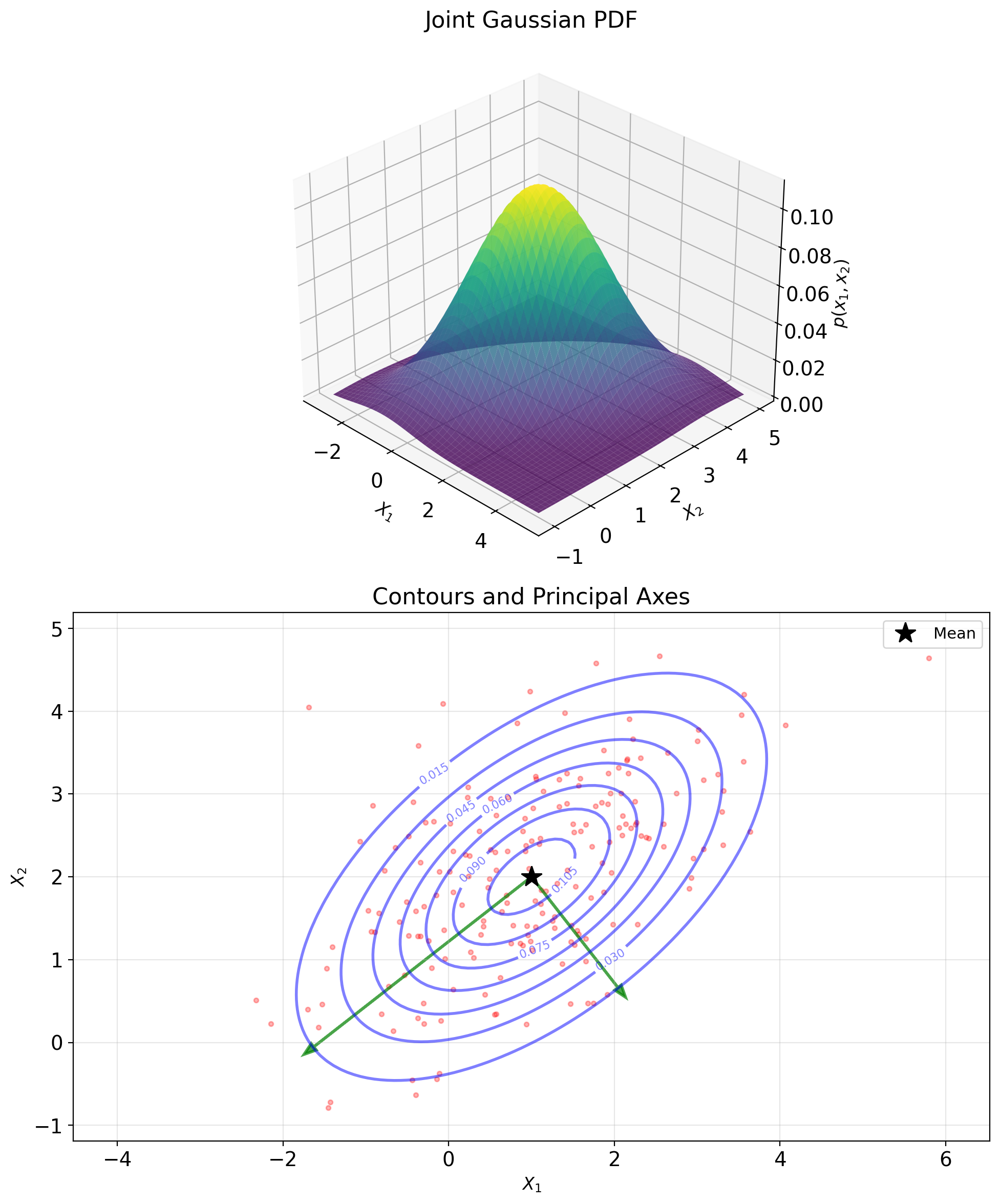
Geometric interpretation:
The set \(\{\mathbf{x} : \mathbf{x}^T A \mathbf{x} = 1\}\) is an ellipsoid.
- Principal axes: eigenvectors of \(A\)
- Axis lengths: \(1/\sqrt{\lambda_i}\)
Why this matters:
Covariance matrices are always positive semi-definite.
The “shape” of a data cloud is an ellipsoid determined by its covariance.
Random Vectors Have Covariance Matrices
Random vector: \(\mathbf{X} = [X_1, X_2, ..., X_n]^T\)
Mean vector: \[\boldsymbol{\mu} = \mathbb{E}[\mathbf{X}] = [\mathbb{E}[X_1], ..., \mathbb{E}[X_n]]^T\]
Covariance matrix: \[K = \mathbb{E}[(\mathbf{X} - \boldsymbol{\mu})(\mathbf{X} - \boldsymbol{\mu})^T]\]
Entry \((i,j)\): \[K_{ij} = \text{Cov}(X_i, X_j)\]
Properties:
- Symmetric: \(K = K^T\)
- Positive semi-definite: \(\mathbf{a}^T K \mathbf{a} \geq 0\)
- Diagonal entries = variances: \(K_{ii} = \text{Var}(X_i)\)
Covariance ellipse:
For 2D data, the ellipse \((\mathbf{x} - \boldsymbol{\mu})^T K^{-1} (\mathbf{x} - \boldsymbol{\mu}) = c^2\) contains approximately 95% of data when \(c \approx 2.45\).
Orthogonality of Random Variables = Orthogonality of Vectors
Random variable inner product:
Define \(\langle X, Y \rangle = \mathbb{E}[XY]\)
For zero-mean variables: \[\langle X, Y \rangle = \mathbb{E}[XY] = \text{Cov}(X, Y)\]
Orthogonal random variables: \[X \perp Y \iff \mathbb{E}[XY] = 0\]
(For zero-mean: \(\text{Cov}(X,Y) = 0\))
The connection:
| Vectors | Random Variables |
|---|---|
| \(\langle \mathbf{x}, \mathbf{y} \rangle = \mathbf{x}^T\mathbf{y}\) | \(\langle X, Y \rangle = \mathbb{E}[XY]\) |
| \(\mathbf{x} \perp \mathbf{y}\) | \(X \perp Y\) |
| Projection minimizes \(\|\mathbf{y} - \hat{\mathbf{y}}\|^2\) | LMMSE minimizes \(\mathbb{E}[(Y - \hat{Y})^2]\) |
| Error \(\perp\) subspace | Error \(\perp\) predictors |
This is why linear algebra solves estimation problems.
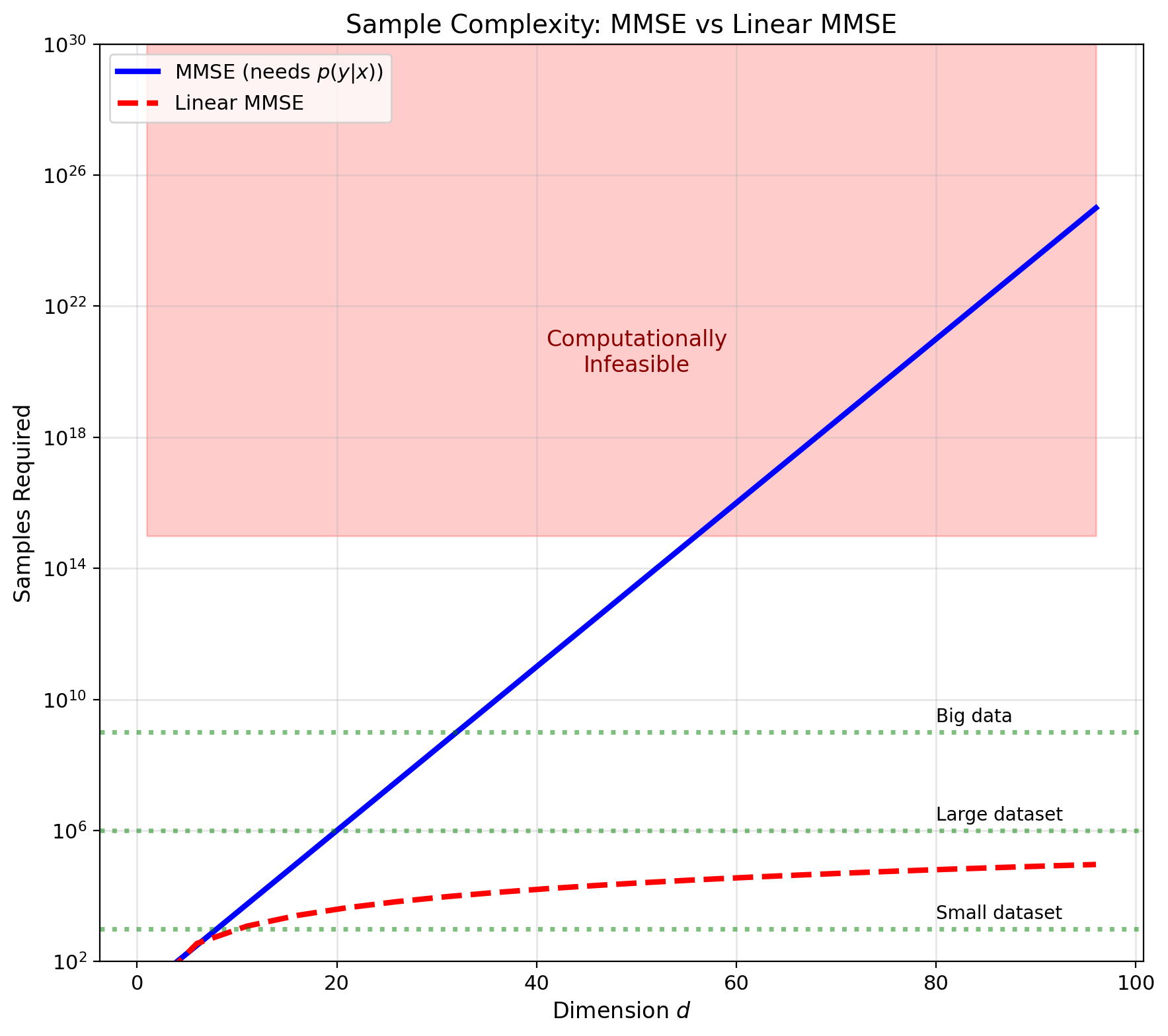
Density Estimation Needs Exponential Samples
Curse of dimensionality:
To compute \(\mathbb{E}[Y|X]\), need \(p(y|x)\)
Density estimation convergence:
- Rate: \(N^{-4/(d+4)}\) for \(d\)-dimensional data
- \(d = 10\): Need \(N \approx 10^6\) samples
- \(d = 100\): Need \(N \approx 10^{20}\) samples!
Why this matters:
- Modern data is high-dimensional
- Never have enough samples for nonparametric methods
- Must accept suboptimality for tractability
Linear class advantages:
- Only need second moments: \(O(d^2)\) parameters
- Sample complexity: \(O(d^2)\) vs \(O(e^d)\)
- Often captures dominant effects
Moments Are Computable; Densities Are Not
MMSE requires \(p(y|x)\) to compute \(\mathbb{E}[Y|X]\)
Reality: We rarely know conditional distributions
What we often have:
- Sample data: \((x_1, y_1), ..., (x_n, y_n)\)
- First and second moments
- Rough sense of relationship
Practical solution: Restrict to linear predictors \[\hat{Y} = aX + b\]
- Only need means, variances, covariance
- Optimal for Gaussian (prove in Part 5)
- Often good enough in practice
Linear Class: Two Parameters Instead of ∞
Function class: \[\mathcal{L} = \{g(x) = ax + b : a, b \in \mathbb{R}\}\]
New optimization problem: \[\min_{a,b} \text{MSE}(a,b) = \min_{a,b} \mathbb{E}[(Y - aX - b)^2]\]
From infinite to finite:
- Before: Search over all functions
- Now: Search over 2 parameters
Expanding the MSE: \[\text{MSE}(a,b) = \mathbb{E}[Y^2 - 2Y(aX + b) + (aX + b)^2]\] \[= \mathbb{E}[Y^2] - 2a\mathbb{E}[XY] - 2b\mathbb{E}[Y]\] \[+ a^2\mathbb{E}[X^2] + 2ab\mathbb{E}[X] + b^2\]
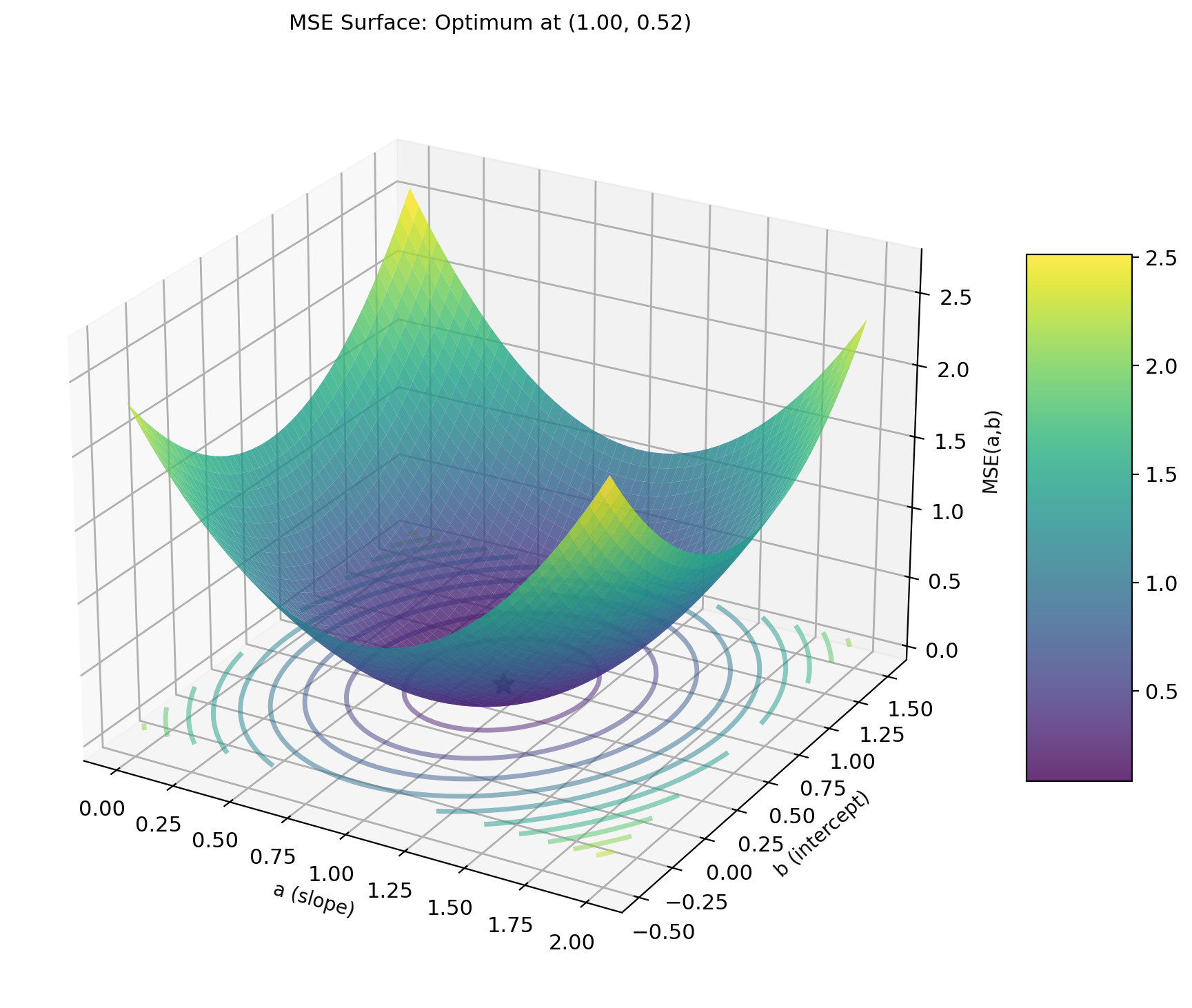
MSE is quadratic in \((a, b)\)
- Unique minimum (if Var\((X) > 0\))
- Closed-form solution via derivatives
- No iterative optimization needed
Optimal Offset Forces Zero Mean Error
Step 1: Find optimal \(b\) for fixed \(a\)
Take derivative with respect to \(b\): \[\frac{\partial}{\partial b}\text{MSE}(a,b) = \frac{\partial}{\partial b}\mathbb{E}[(Y - aX - b)^2]\]
\[= -2\mathbb{E}[Y - aX - b] = 0\]
Solving for \(b\): \[\mathbb{E}[Y - aX - b] = 0\] \[\mathbb{E}[Y] - a\mathbb{E}[X] - b = 0\]
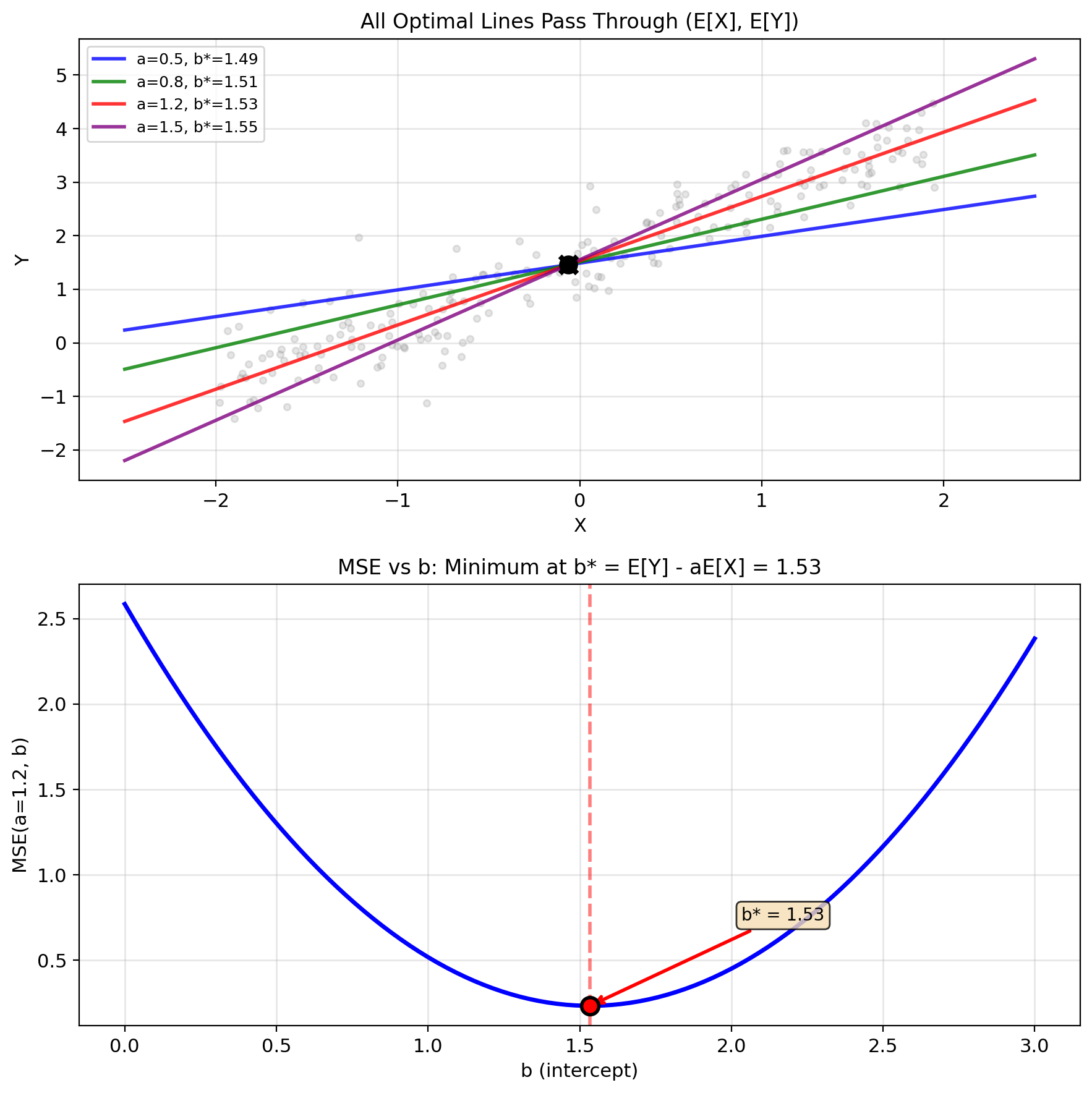
\[\boxed{b^* = \mathbb{E}[Y] - a\mathbb{E}[X]}\]
Interpretation:
- Offset ensures zero mean error
- Forces predictor through \((\mathbb{E}[X], \mathbb{E}[Y])\)
- Adjusts for non-zero means
Substituting back: \[\hat{Y} = aX + \mathbb{E}[Y] - a\mathbb{E}[X] = \mathbb{E}[Y] + a(X - \mathbb{E}[X])\]
Optimal Slope = Cov(X,Y)/Var(X)
Step 2: Find optimal \(a\) using \(b^* = \mathbb{E}[Y] - a\mathbb{E}[X]\)
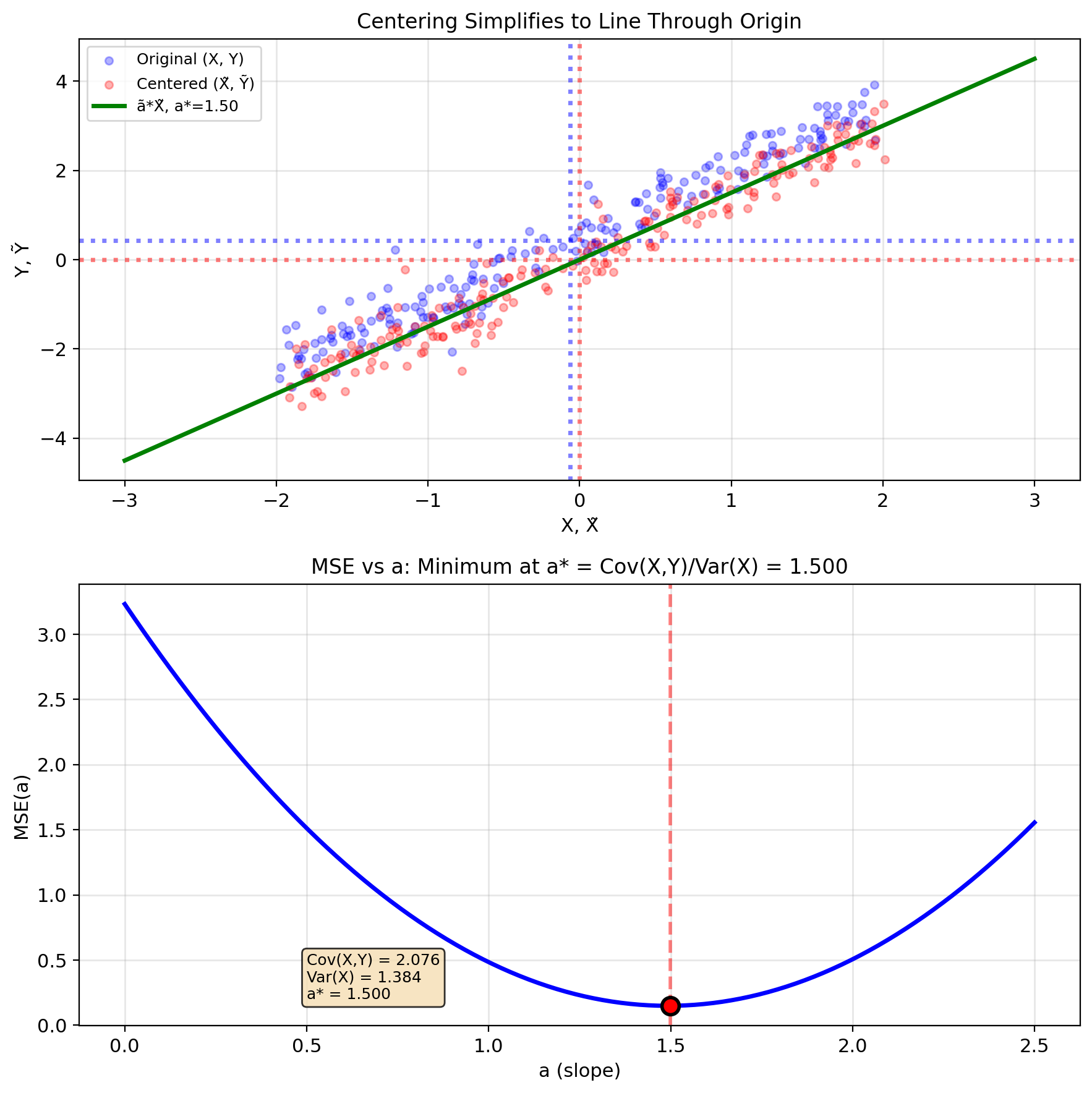
Substitute into MSE: \[\text{MSE}(a) = \mathbb{E}[(Y - \mathbb{E}[Y] - a(X - \mathbb{E}[X]))^2]\]
Define centered variables:
- \(\tilde{Y} = Y - \mathbb{E}[Y]\)
- \(\tilde{X} = X - \mathbb{E}[X]\)
Then: \(\text{MSE}(a) = \mathbb{E}[(\tilde{Y} - a\tilde{X})^2]\)
Take derivative: \[\frac{d}{da}\text{MSE}(a) = -2\mathbb{E}[\tilde{X}(\tilde{Y} - a\tilde{X})] = 0\]
\[\mathbb{E}[\tilde{X}\tilde{Y}] - a\mathbb{E}[\tilde{X}^2] = 0\]
Solution: \[\boxed{a^* = \frac{\mathbb{E}[\tilde{X}\tilde{Y}]}{\mathbb{E}[\tilde{X}^2]} = \frac{\text{Cov}(X,Y)}{\text{Var}(X)}}\]
Note: \(\mathbb{E}[\tilde{X}\tilde{Y}] = \text{Cov}(X,Y)\) and \(\mathbb{E}[\tilde{X}^2] = \text{Var}(X)\)
Same Solution from Orthogonality Conditions
Alternative approach: Require error orthogonal to predictors
From MMSE theory: optimal error satisfies \[\mathbb{E}[(Y - \hat{Y}) \cdot h(X)] = 0\] for functions \(h\) in the predictor class.
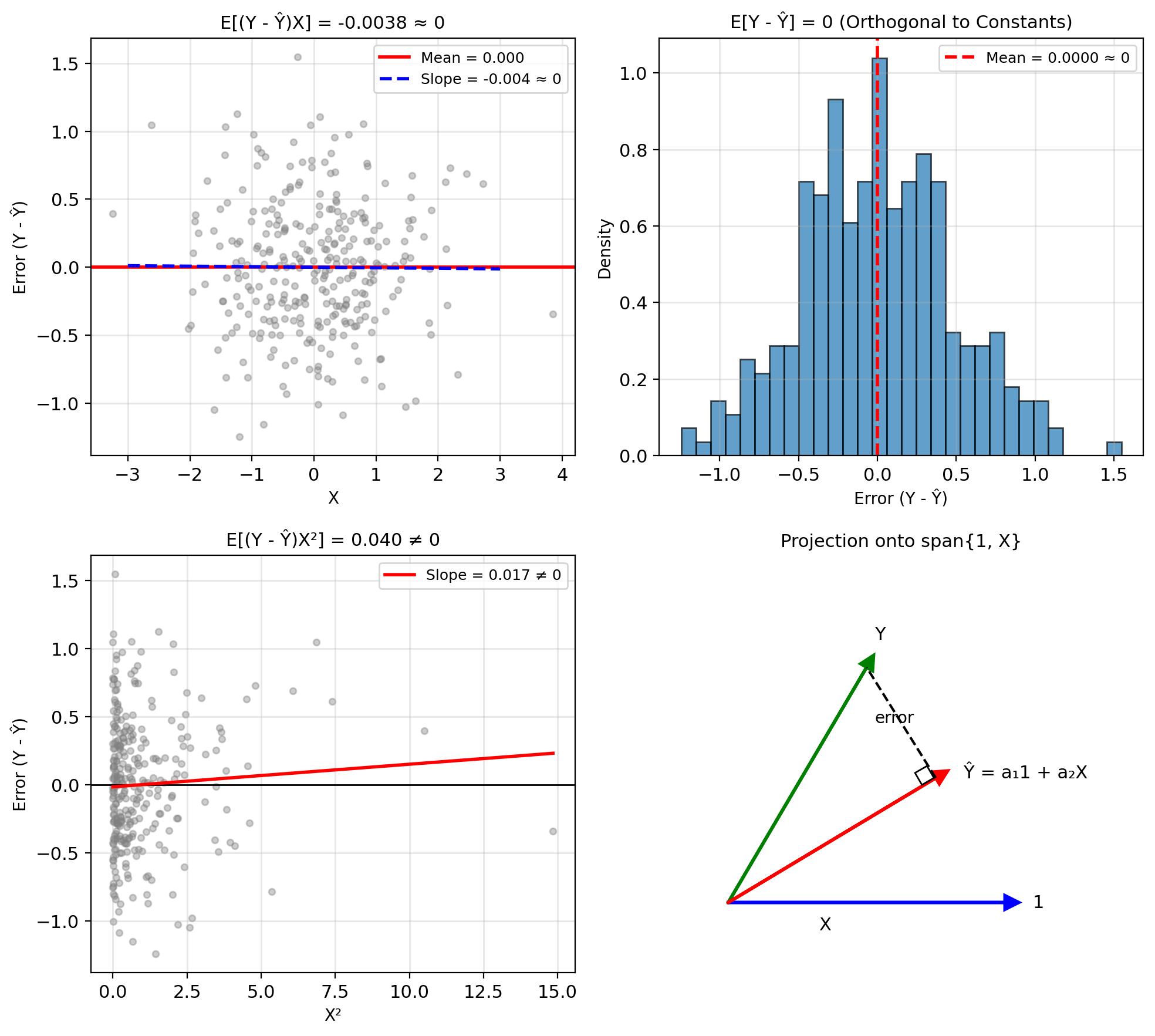
For linear predictors \(\hat{Y} = aX + b\):
Predictor class = span\(\{1, X\}\)
Orthogonality conditions:
\(\mathbb{E}[(Y - aX - b) \cdot 1] = 0\) \[\mathbb{E}[Y] - a\mathbb{E}[X] - b = 0\] \[\boxed{b = \mathbb{E}[Y] - a\mathbb{E}[X]}\]
\(\mathbb{E}[(Y - aX - b) \cdot X] = 0\) \[\mathbb{E}[XY] - a\mathbb{E}[X^2] - b\mathbb{E}[X] = 0\]
Substitute \(b\) and solve: \[\boxed{a = \frac{\text{Cov}(X,Y)}{\text{Var}(X)}}\]
Same answer, different route
- Calculus: minimize MSE directly
- Orthogonality: project onto subspace
Orthogonality generalizes to vectors without derivatives.
LMS Learns LMMSE from Streaming Data
Problem: Don’t know statistics a priori
LMMSE needs: \(\text{Cov}(X,Y)\) and \(\text{Var}(X)\)
Solution: Learn from streaming data
Gradient descent on MSE: \[\frac{\partial}{\partial a} \mathbb{E}[(Y - aX - b)^2] = -2\mathbb{E}[(Y - aX - b)X]\]
Widrow-Hoff insight:
Replace expectation with instantaneous value: \[\mathbb{E}[(Y - aX - b)X] \approx (y_i - ax_i - b)x_i = e_i x_i\]
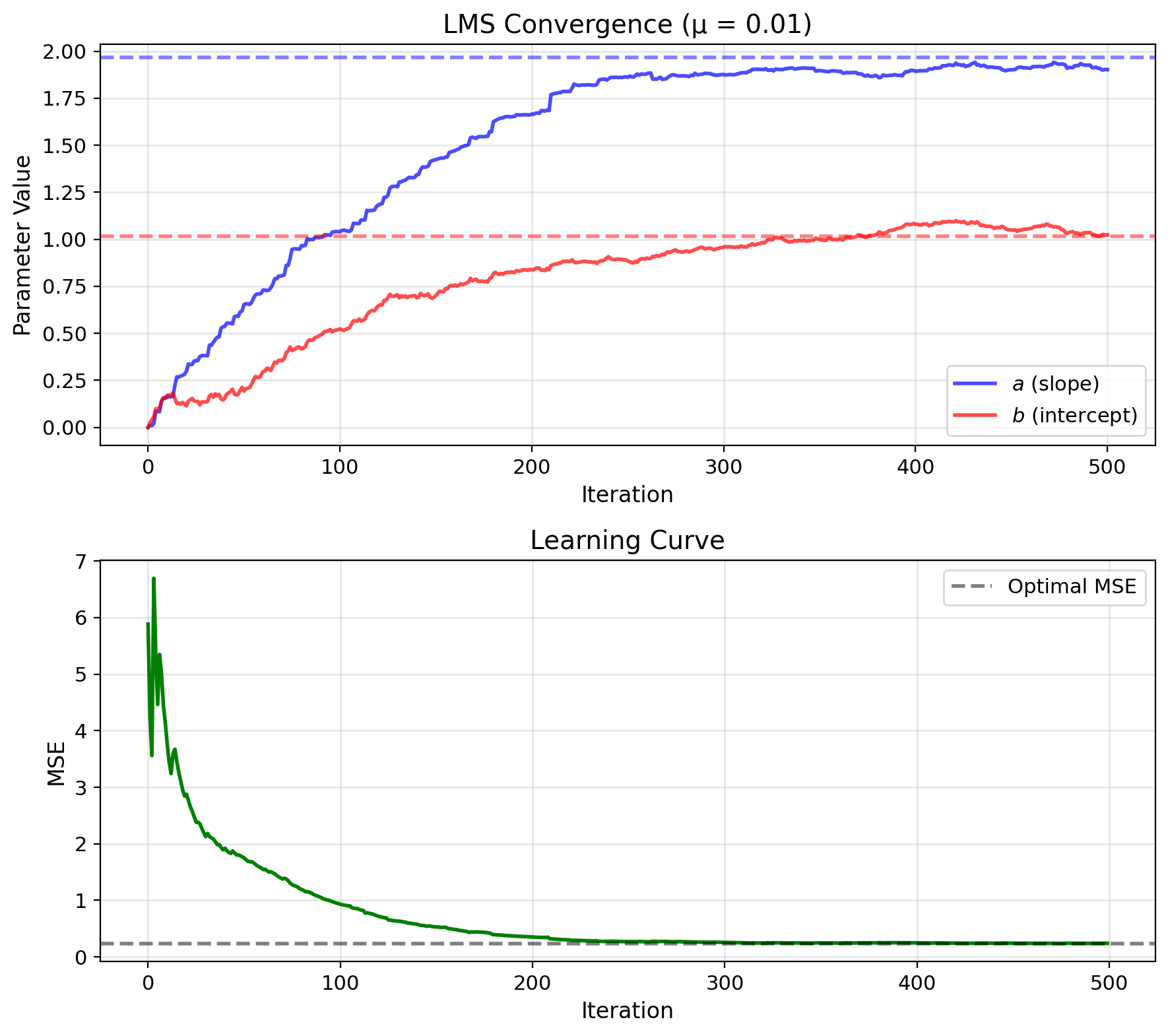
LMS update rule: \[a_{i+1} = a_i + \mu e_i x_i\] \[b_{i+1} = b_i + \mu e_i\]
where \(e_i = y_i - \hat{y}_i\) is prediction error
Convergence: \(a_i \to a^*_{\text{LMMSE}}\) as \(i \to \infty\)
Learning Rate Trades Convergence for Variance
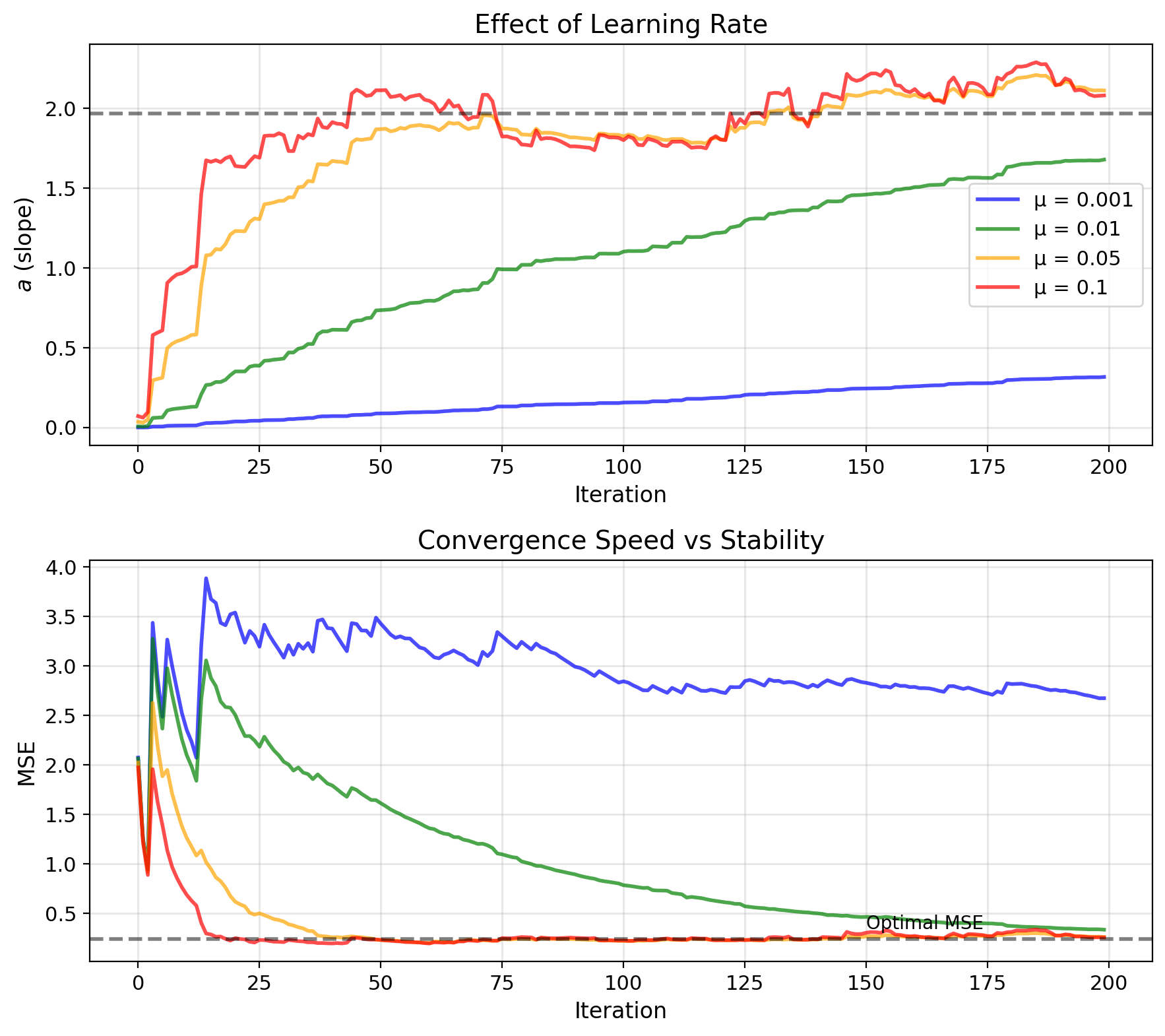
Convergence condition: \[0 < \mu < \frac{2}{\mathbb{E}[X^2]}\]
Too large \(\mu\) → divergence
Steady-state error:
Misadjustment: \(M = \frac{\mu \mathbb{E}[X^2]}{2}\)
Trade-off:
- Small \(\mu\): Slow convergence, low steady-state error
- Large \(\mu\): Fast convergence, high steady-state error
Time constant: \[\tau \approx \frac{1}{2\mu \mathbb{E}[X^2]}\]
iterations to converge
Advantages:
- No matrix operations
- Adapts to changing statistics
- Simple hardware implementation
Relation: LMS = stochastic gradient descent for MSE
LMMSE Needs Only Means and Covariances
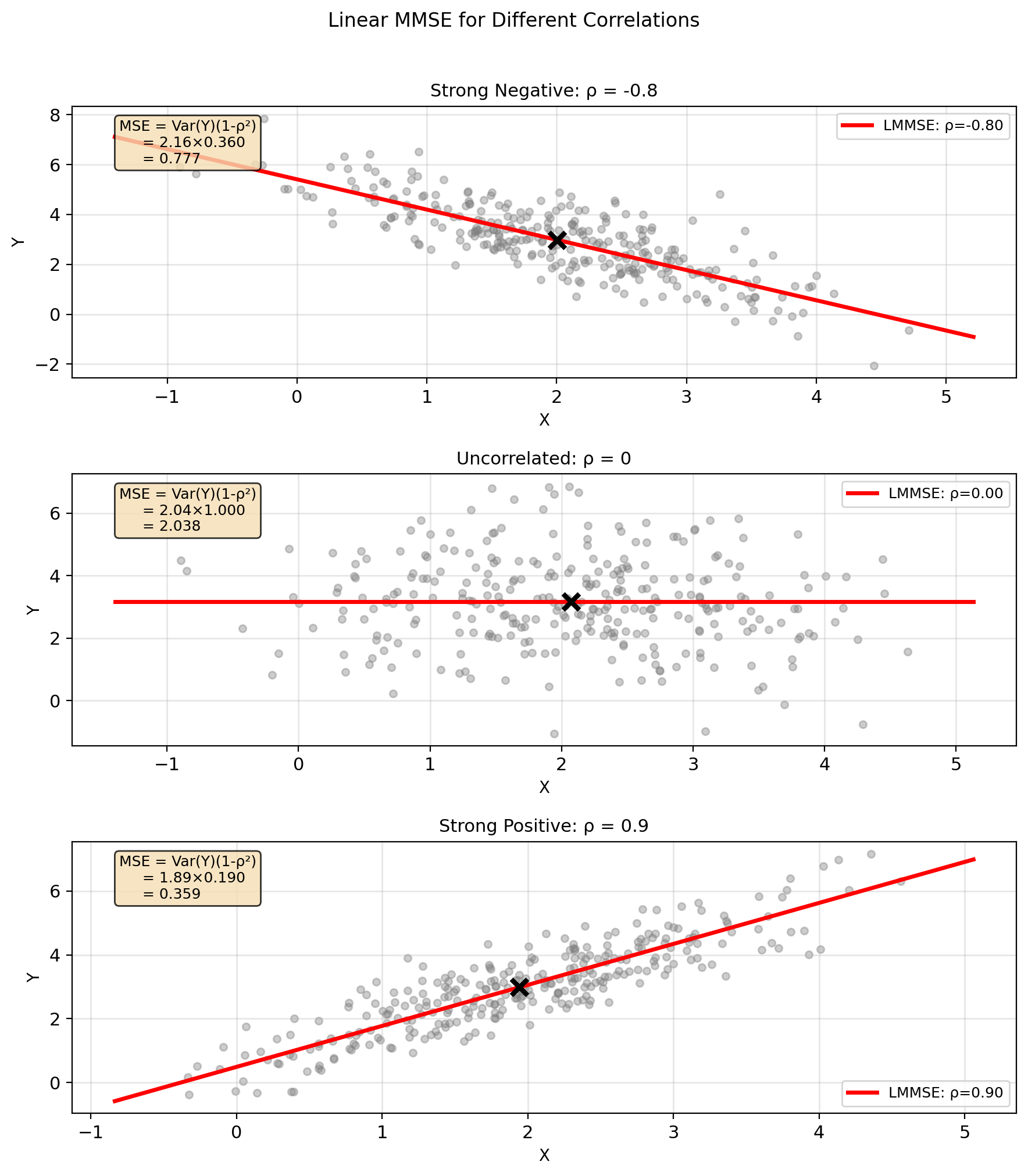
Complete solution: \[\boxed{\hat{Y}_{\text{LMMSE}} = \mathbb{E}[Y] + \frac{\text{Cov}(X,Y)}{\text{Var}(X)}(X - \mathbb{E}[X])}\]
Alternative forms:
Using correlation \(\rho = \frac{\text{Cov}(X,Y)}{\sigma_X \sigma_Y}\): \[\hat{Y}_{\text{LMMSE}} = \mathbb{E}[Y] + \rho\frac{\sigma_Y}{\sigma_X}(X - \mathbb{E}[X])\]
Standardized form: If \(\mathbb{E}[X] = \mathbb{E}[Y] = 0\) and \(\sigma_X = \sigma_Y = 1\): \[\hat{Y}_{\text{LMMSE}} = \rho X\]
Minimum MSE: \[\text{MSE}_{\text{LMMSE}} = \text{Var}(Y)(1 - \rho^2)\]
Properties:
- Only needs first and second moments
- Always exists (if Var\((X) > 0\))
- Unique solution
- Orthogonal errors: \(\mathbb{E}[(Y - \hat{Y})X] = 0\)
ρ² = Fraction of Variance Explained
Slope decomposition: \[a^* = \frac{\text{Cov}(X,Y)}{\text{Var}(X)} = \frac{\rho \sigma_X \sigma_Y}{\sigma_X^2} = \rho \frac{\sigma_Y}{\sigma_X}\]
Correlation determines predictability
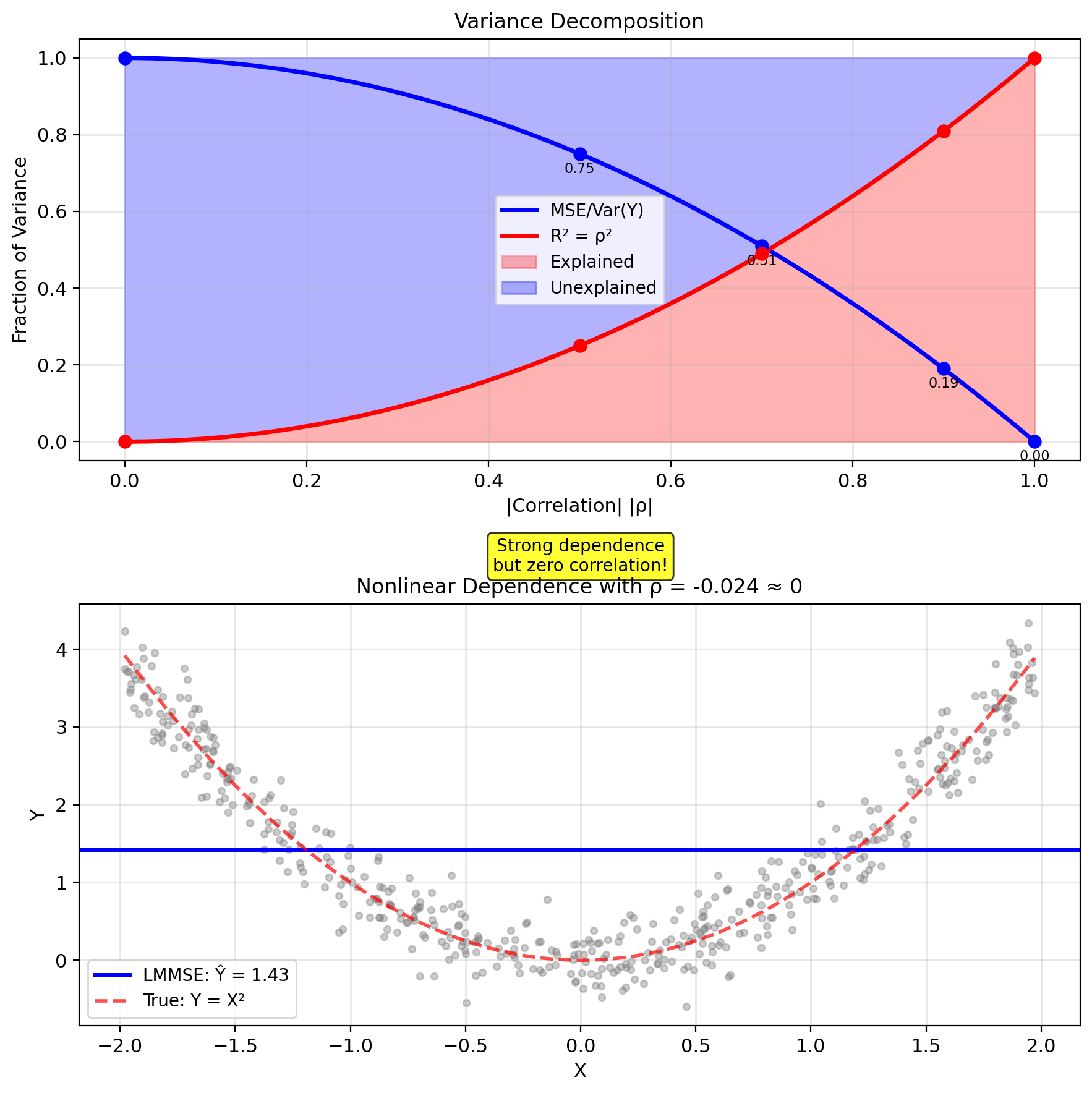
Fraction of variance explained: \[R^2 = \frac{\text{Var}(Y) - \text{MSE}_{\text{LMMSE}}}{\text{Var}(Y)} = \rho^2\]
Correlation measures linear predictability, not general dependence
LMMSE = MMSE Iff E[Y|X] Is Linear
Fundamental inequality: \[\text{MSE}_{\text{LMMSE}} \geq \text{MSE}_{\text{MMSE}}\]
Always! Linear is restricted class.
Performance gap: \[\text{MSE}_{\text{LMMSE}} - \text{MSE}_{\text{MMSE}} = \mathbb{E}[(\mathbb{E}[Y|X] - \hat{Y}_{\text{LMMSE}})^2]\]
Measures nonlinearity of \(\mathbb{E}[Y|X]\).
When are they equal? \[\text{MSE}_{\text{LMMSE}} = \text{MSE}_{\text{MMSE}}\] if and only if \(\mathbb{E}[Y|X]\) is linear in \(X\).
For jointly Gaussian \((X,Y)\):
- \(\mathbb{E}[Y|X]\) is linear
- LMMSE = MMSE
- No performance loss from restriction
LMMSE Error \(\perp\) \(\{1, X\}\), Not All \(h(X)\)
MMSE (unrestricted): \[\mathbb{E}[(Y - \mathbb{E}[Y|X]) \cdot h(X)] = 0 \quad \text{for all } h\]
LMMSE (restricted): \[\mathbb{E}[(Y - \hat{Y}_{\text{LMMSE}}) \cdot h(X)] = 0 \quad \text{for } h \in \{1, X\}\]
LMMSE error may still correlate with \(X^2, X^3, \sin(X), ...\)
\[\mathbb{E}[(Y - \hat{Y}_{\text{LMMSE}}) \cdot X^2] \neq 0 \text{ (in general)}\]
This correlation is unexploited information—structure in \((X, Y)\) that linear predictors cannot capture.
When LMMSE achieves MMSE:
If \(\mathbb{E}[Y|X]\) is already linear in \(X\):
- LMMSE error ⊥ all \(h(X)\) automatically
- No nonlinear structure to exploit
- Gaussian \((X,Y)\) guarantees this
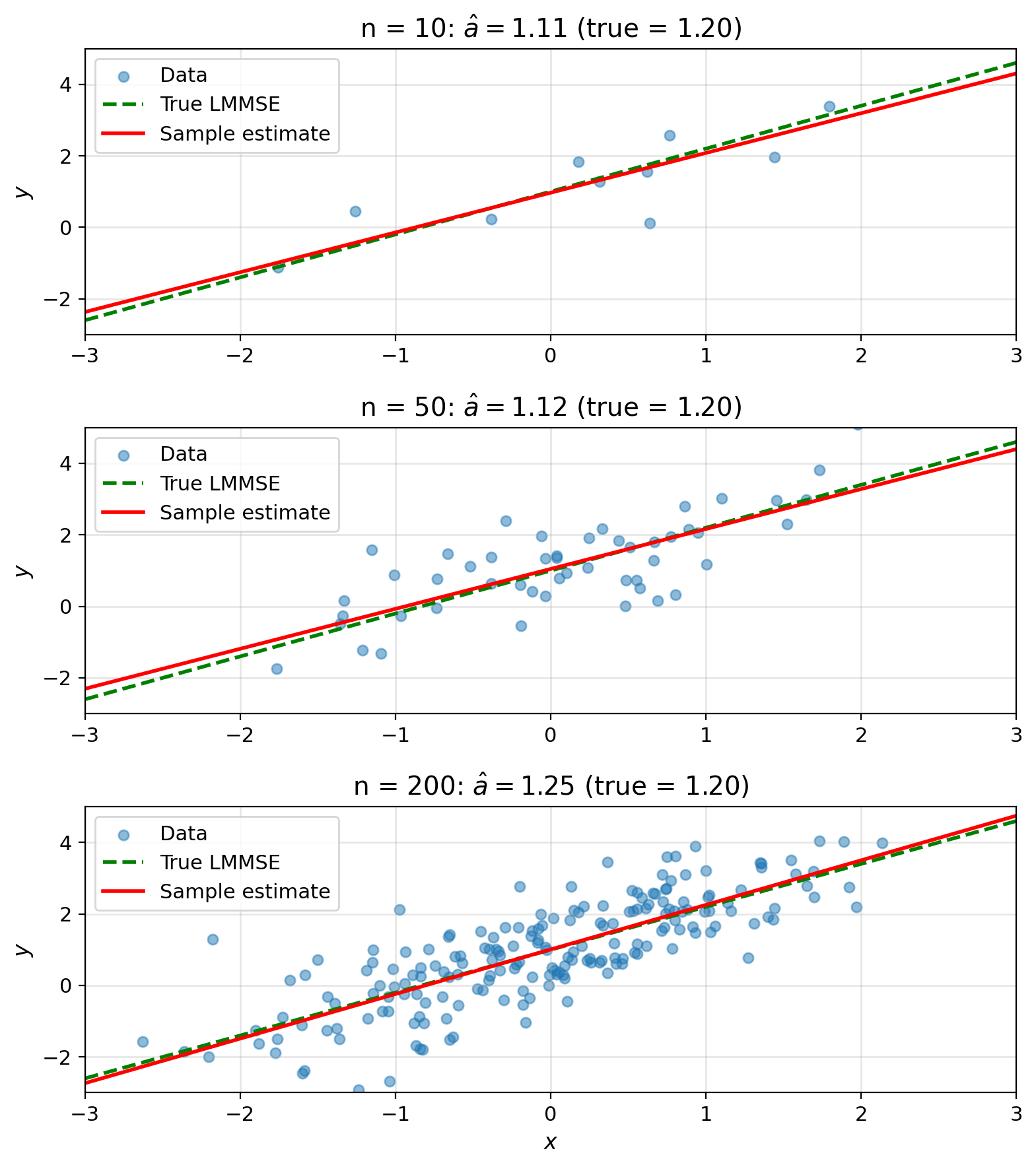
Sample Estimates Converge to Population LMMSE
What we need:
- \(\mathbb{E}[X], \mathbb{E}[Y]\)
- \(\mathbb{E}[X^2], \mathbb{E}[Y^2], \mathbb{E}[XY]\)
Sample estimates from data \((x_1, y_1), ..., (x_n, y_n)\): \[\hat{\mu}_X = \frac{1}{n}\sum_{i=1}^n x_i, \quad \hat{\mu}_Y = \frac{1}{n}\sum_{i=1}^n y_i\]
\[\widehat{\text{Var}}(X) = \frac{1}{n-1}\sum_{i=1}^n (x_i - \hat{\mu}_X)^2\]
\[\widehat{\text{Cov}}(X,Y) = \frac{1}{n-1}\sum_{i=1}^n (x_i - \hat{\mu}_X)(y_i - \hat{\mu}_Y)\]
Then: \(\hat{a} = \widehat{\text{Cov}}(X,Y)/\widehat{\text{Var}}(X)\)
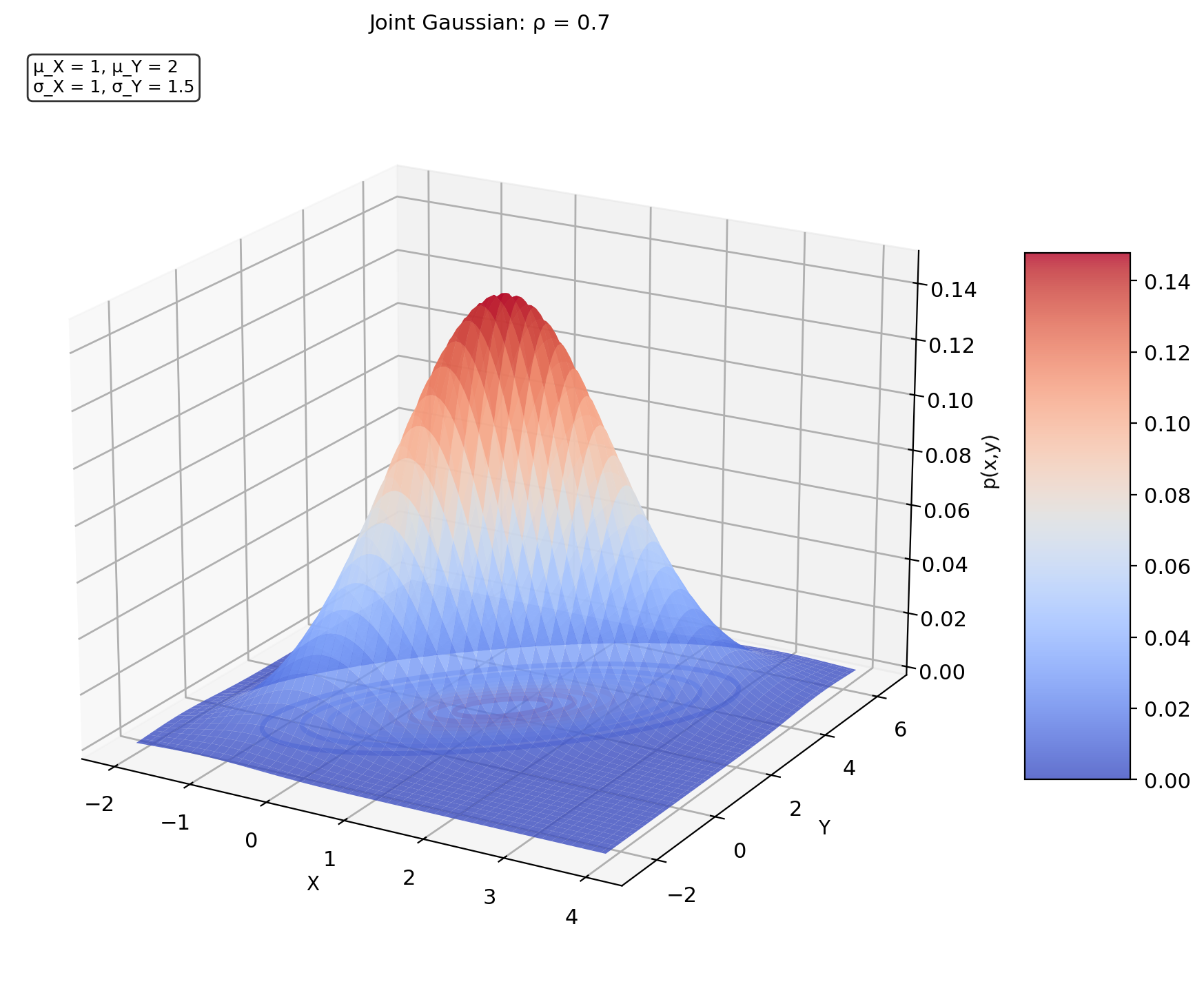
Moments Fully Specify the Bivariate Gaussian
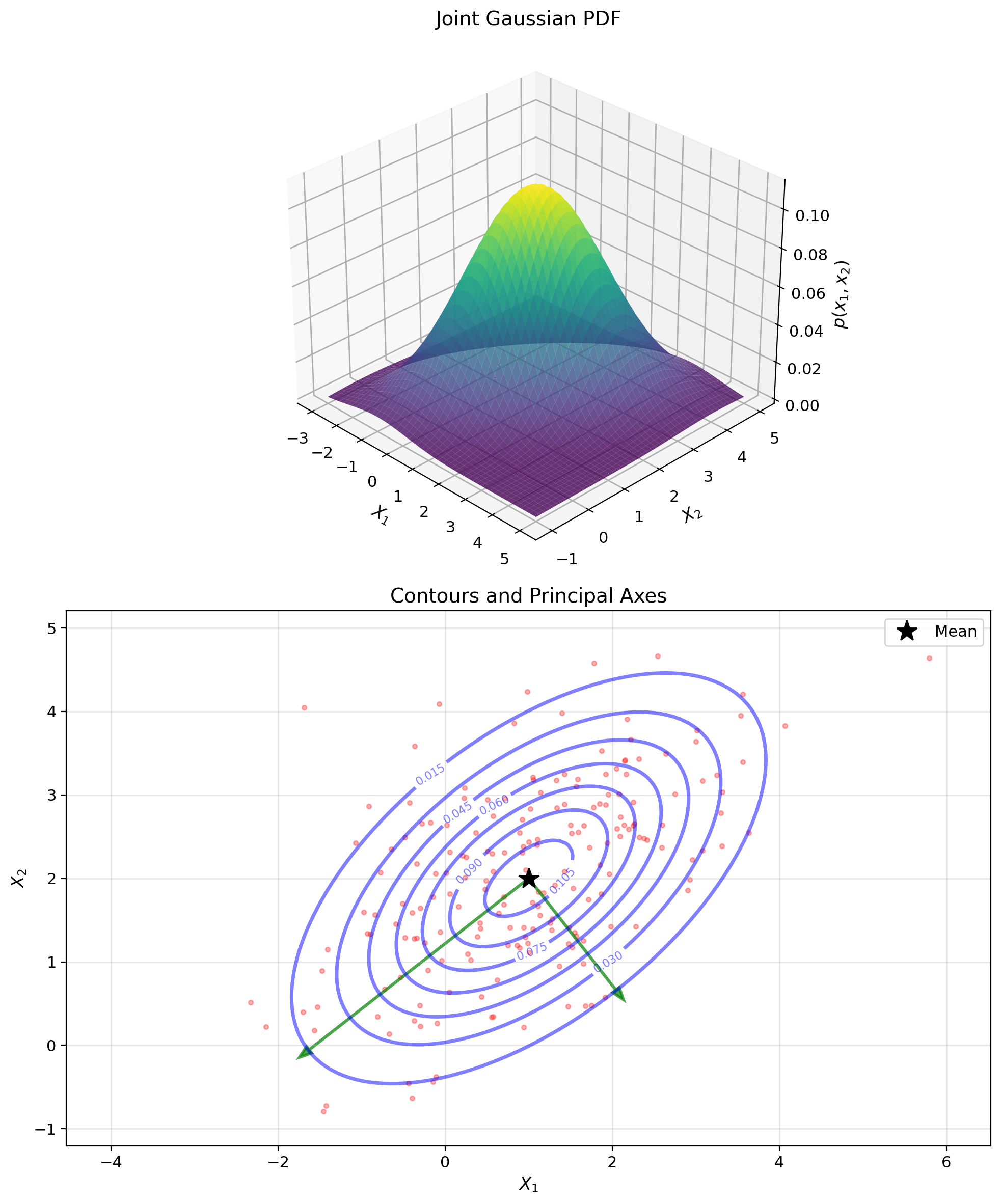
Bivariate Gaussian \((X, Y) \sim \mathcal{N}(\mu, K)\)
Parameters: \[\mu = \begin{bmatrix} \mu_X \\ \mu_Y \end{bmatrix}, \quad K = \begin{bmatrix} \sigma_X^2 & k_{XY} \\ k_{XY} & \sigma_Y^2 \end{bmatrix}\]
where \(k_{XY} = \rho\sigma_X\sigma_Y\)
Joint density: \[p(x,y) = \frac{1}{2\pi\sigma_X\sigma_Y\sqrt{1-\rho^2}} \exp\left(-\frac{1}{2(1-\rho^2)}\left[z_x^2 - 2\rho z_x z_y + z_y^2\right]\right)\]
where \(z_x = \frac{x-\mu_X}{\sigma_X}\) and \(z_y = \frac{y-\mu_Y}{\sigma_Y}\) are standardized variables
Fully determined by first and second moments
- 5 parameters: \(\mu_X, \mu_Y, \sigma_X^2, \sigma_Y^2, \rho\)
- All higher moments determined by these
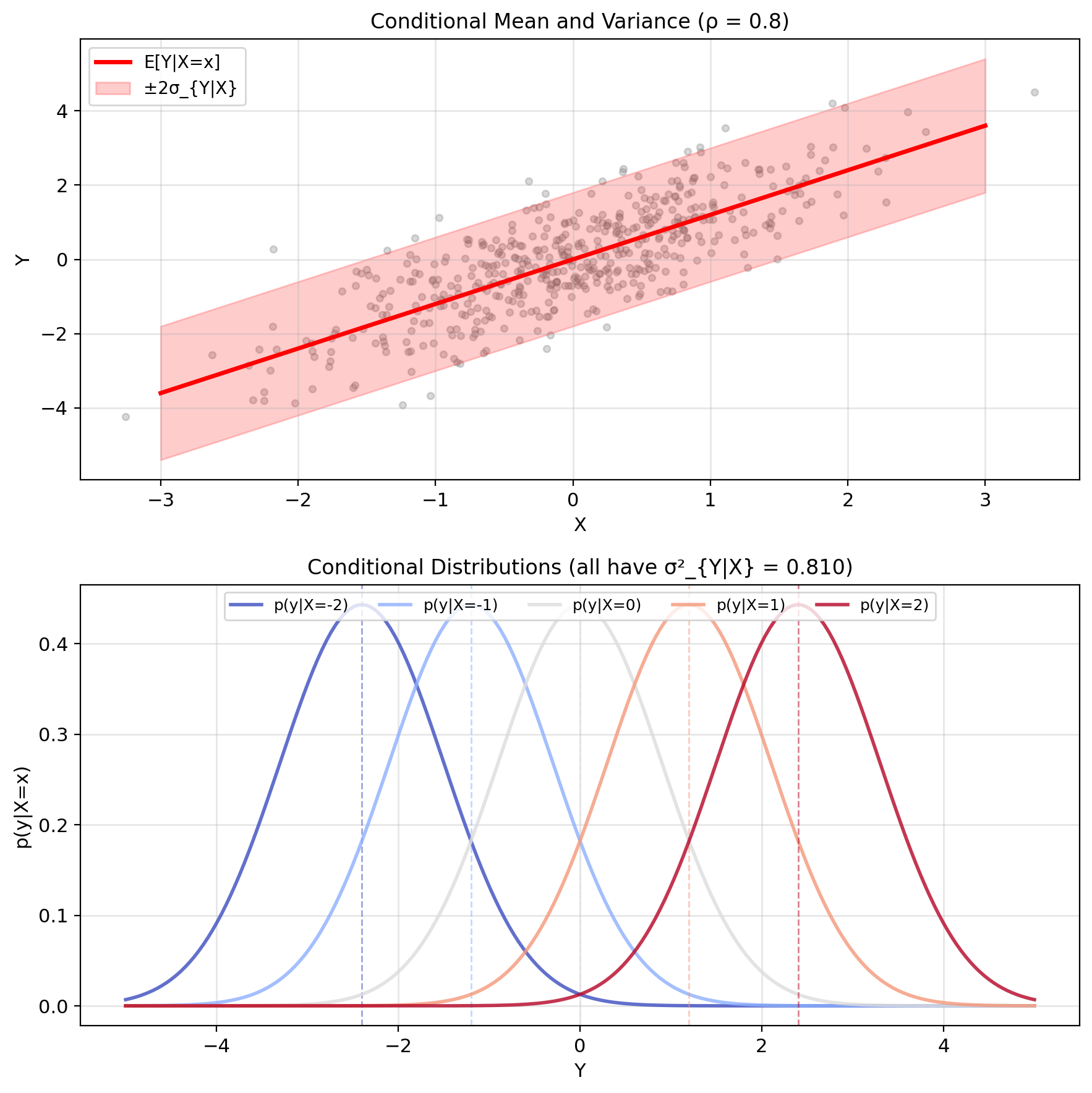
Gaussian Y|X Has Linear Mean, Constant Variance
Result: \(Y|X=x\) is Gaussian
Conditional mean: \[\mathbb{E}[Y|X=x] = \mu_Y + \rho\frac{\sigma_Y}{\sigma_X}(x - \mu_X)\]
Conditional variance (constant!): \[\text{Var}(Y|X=x) = \sigma_Y^2(1 - \rho^2)\]
Therefore: \[Y|X=x \sim \mathcal{N}\left(\mu_Y + \rho\frac{\sigma_Y}{\sigma_X}(x - \mu_X), \sigma_Y^2(1 - \rho^2)\right)\]
Observations:
- \(\mathbb{E}[Y|X=x]\) is linear in \(x\)
- \(\text{Var}(Y|X=x)\) independent of \(x\)
- Conditional distribution remains Gaussian
Regression line: \[y = \mu_Y + \rho\frac{\sigma_Y}{\sigma_X}(x - \mu_X)\] passes through \((\mu_X, \mu_Y)\) with slope \(\rho\sigma_Y/\sigma_X\)
Three Methods Give the Same Linear Formula
Method 1: Complete the square
Start with joint density, condition on \(X = x\): \[p(y|x) \propto \exp\left(-\frac{1}{2(1-\rho^2)\sigma_Y^2}\left(y - \mu_Y - \rho\frac{\sigma_Y}{\sigma_X}(x-\mu_X)\right)^2\right)\]
Method 2: Linear projection
Find \(a, b\) minimizing \(\mathbb{E}[(Y - aX - b)^2]\):
- \(a^* = \text{Cov}(X,Y)/\text{Var}(X) = \rho\sigma_Y/\sigma_X\)
- \(b^* = \mathbb{E}[Y] - a^*\mathbb{E}[X] = \mu_Y - a^*\mu_X\)
Method 3: Schur complement
Using block matrix operations on \(K\): \[\mathbb{E}[Y|X=x] = \mu_Y + k_{YX}k_{XX}^{-1}(x - \mu_X)\] \[= \mu_Y + \rho\sigma_X\sigma_Y \cdot \frac{1}{\sigma_X^2}(x - \mu_X)\]
(all methods give same result)
MMSE = LMMSE for Gaussian
Fundamental result: For jointly Gaussian \((X, Y)\)
\[\boxed{\hat{Y}_{\text{MMSE}} = \hat{Y}_{\text{LMMSE}} = \mu_Y + \rho\frac{\sigma_Y}{\sigma_X}(X - \mu_X)}\]
Why equal?
- MMSE: \(\hat{Y}_{\text{MMSE}} = \mathbb{E}[Y|X]\)
- For Gaussian: \(\mathbb{E}[Y|X]\) is linear
- LMMSE: Best linear predictor
Minimum MSE: \[\text{MSE}_{\min} = \sigma_Y^2(1 - \rho^2)\]
Implications:
- No need to consider nonlinear predictors
- Second moments sufficient for optimal prediction
- Closed-form solution
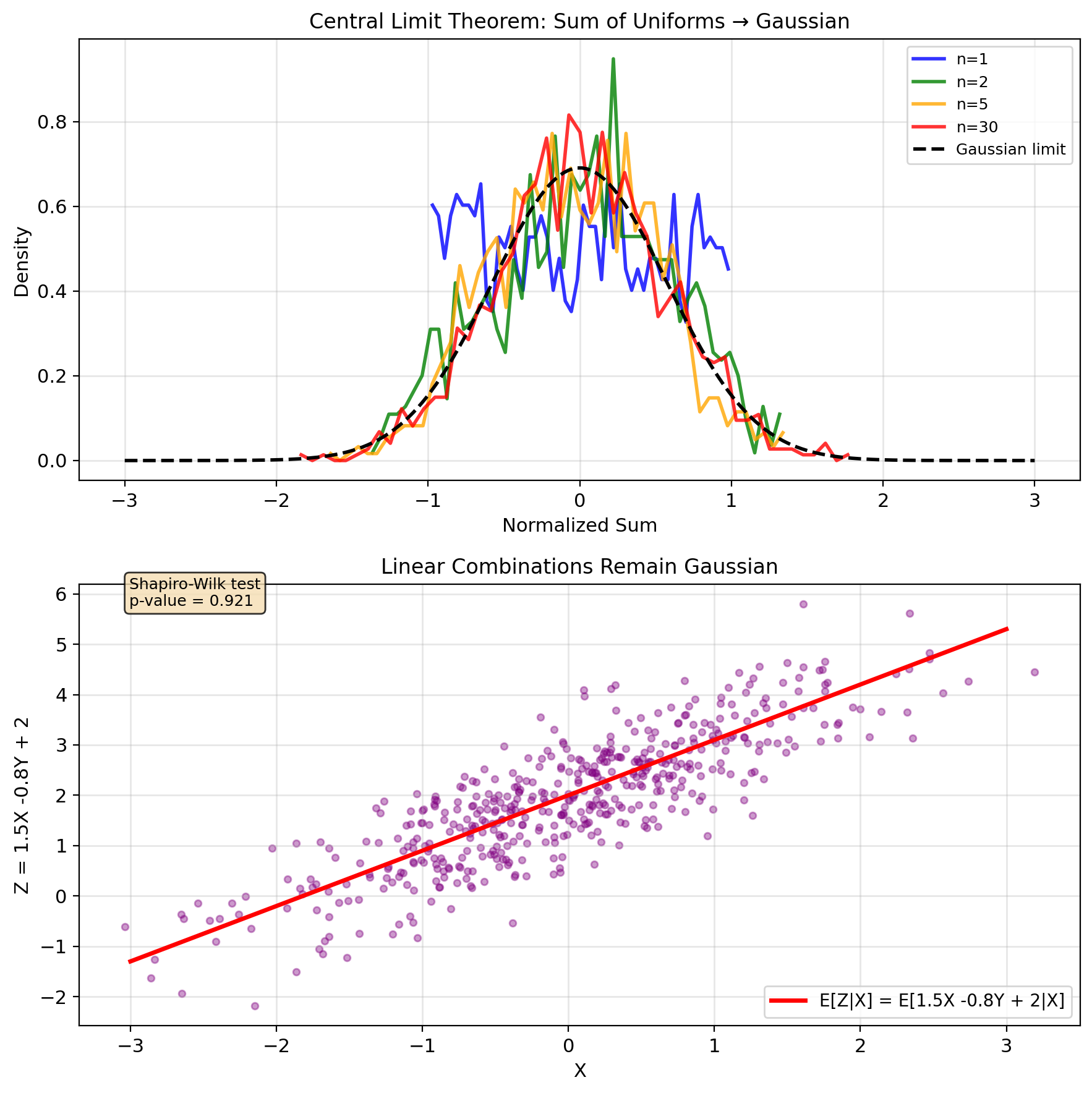
When Gaussian Assumptions Are Reasonable
Maximum entropy property: Among all distributions with given mean and covariance, Gaussian has maximum entropy \[H(X,Y) = -\int\int p(x,y)\log p(x,y) \, dx \, dy\]
Central Limit Theorem: Sum of many independent effects → Gaussian \[\frac{1}{\sqrt{n}}\sum_{i=1}^n X_i \xrightarrow{d} \mathcal{N}(\mu, \sigma^2)\]
Preserved under linear operations: If \((X,Y)\) Gaussian and \(Z = aX + bY + c\):
- \(Z\) is Gaussian
- \((X,Z)\) jointly Gaussian
- \((Y,Z)\) jointly Gaussian
Sufficient statistics: For Gaussian, sample mean and covariance are sufficient
- No information lost by summarizing with \((\bar{X}, \bar{Y}, S_{XX}, S_{YY}, S_{XY})\)
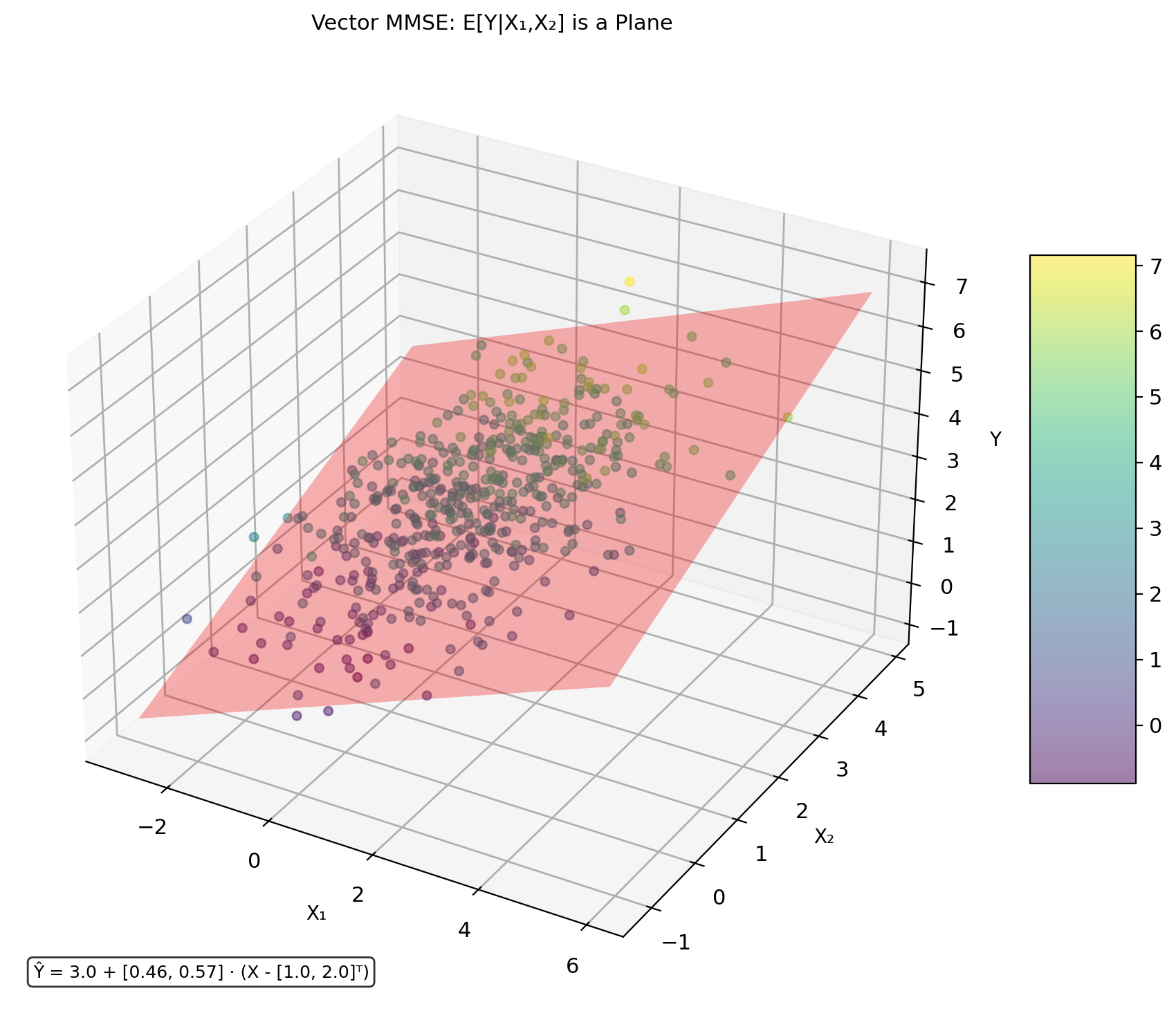
Vector Gaussian MMSE Requires Matrix Inversion
Multivariate Gaussian: \(\mathbf{X} = [X_1, ..., X_n]^T\), \(\mathbf{Y} = [Y_1, ..., Y_m]^T\)
Joint distribution: \[\begin{bmatrix} \mathbf{X} \\ \mathbf{Y} \end{bmatrix} \sim \mathcal{N}\left(\begin{bmatrix} \boldsymbol{\mu}_X \\ \boldsymbol{\mu}_Y \end{bmatrix}, \begin{bmatrix} \mathbf{K}_{XX} & \mathbf{K}_{XY} \\ \mathbf{K}_{YX} & \mathbf{K}_{YY} \end{bmatrix}\right)\]
MMSE estimator (still linear!): \[\hat{\mathbf{Y}}_{\text{MMSE}} = \mathbb{E}[\mathbf{Y}|\mathbf{X}] = \boldsymbol{\mu}_Y + \mathbf{K}_{YX}\mathbf{K}_{XX}^{-1}(\mathbf{X} - \boldsymbol{\mu}_X)\]
Error covariance: \[\mathbf{K}_{\mathbf{Y}|\mathbf{X}} = \mathbf{K}_{YY} - \mathbf{K}_{YX}\mathbf{K}_{XX}^{-1}\mathbf{K}_{XY}\]
Computational considerations:
- Matrix inversion: \(O(n^3)\)
- Numerical stability
- Regularization for singular \(\mathbf{K}_{XX}\)
Everything generalizes!
Sample LMMSE Converges to Population LMMSE
Theory (Population)
Given joint distribution \(p(x,y)\): \[\text{MSE} = \mathbb{E}[(Y - \hat{Y})^2]\]
Linear MMSE solution: \[a^* = \frac{\text{Cov}(X,Y)}{\text{Var}(X)} = \frac{\mathbb{E}[XY] - \mathbb{E}[X]\mathbb{E}[Y]}{\mathbb{E}[X^2] - \mathbb{E}[X]^2}\]
Practice (Sample)
Given data \(\{(x_i, y_i)\}_{i=1}^n\): \[\text{MSE}_n = \frac{1}{n}\sum_{i=1}^n (y_i - \hat{y}_i)^2\]
Sample estimates: \[\hat{a} = \frac{\sum_i (x_i - \bar{x})(y_i - \bar{y})}{\sum_i (x_i - \bar{x})^2}\]
Convergence: \(\hat{a} \to a^*\) as \(n \to \infty\) (law of large numbers)
This is linear regression
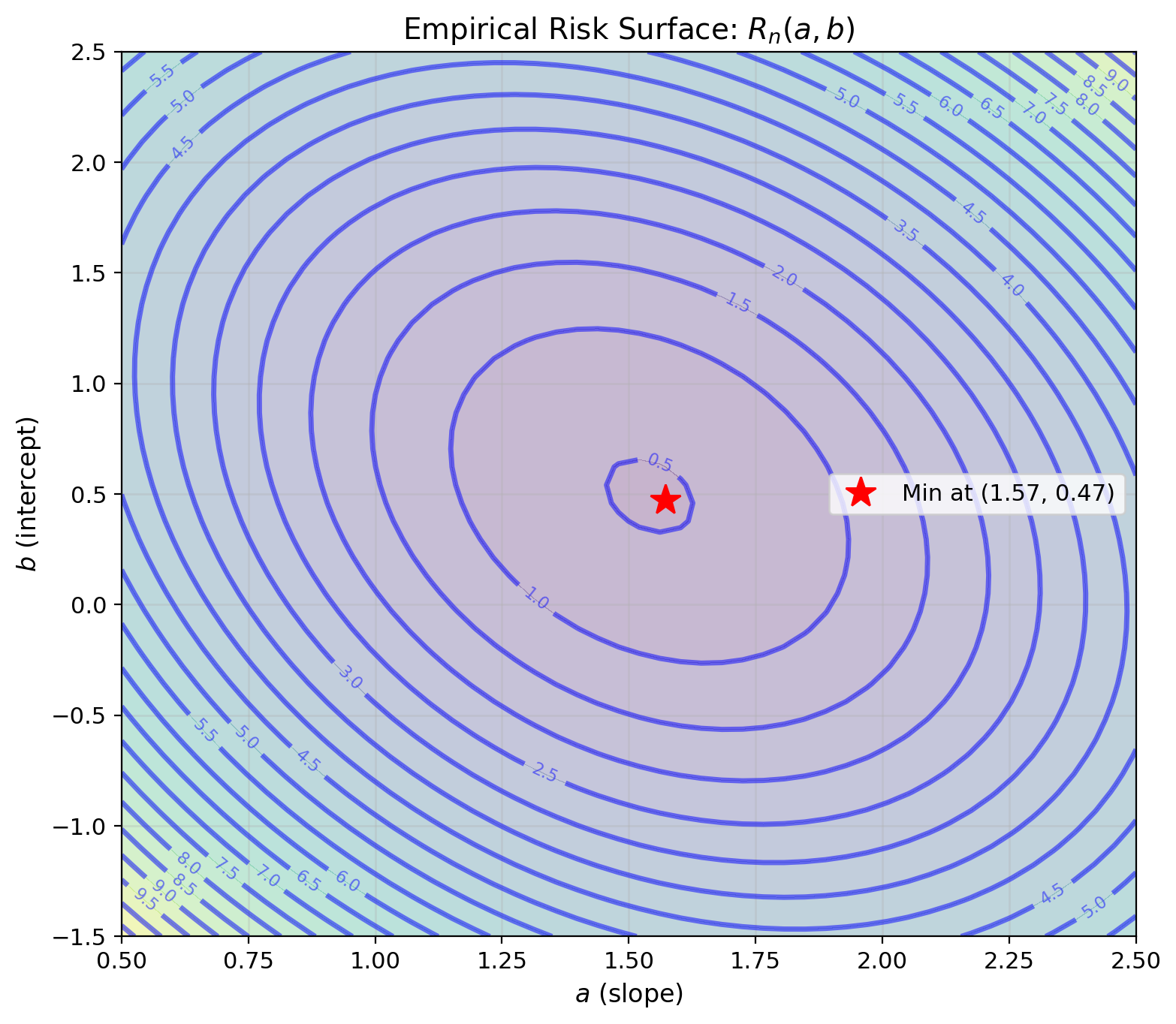
Minimizing Sample MSE = Least Squares
Population risk (unknown): \[R(a,b) = \mathbb{E}[(Y - aX - b)^2]\]
Empirical risk (computable): \[R_n(a,b) = \frac{1}{n}\sum_{i=1}^n (y_i - ax_i - b)^2\]
Optimization: \[\frac{\partial R_n}{\partial b} = -\frac{2}{n}\sum_{i=1}^n (y_i - ax_i - b) = 0\] \[\implies b = \bar{y} - a\bar{x}\]
\[\frac{\partial R_n}{\partial a} = -\frac{2}{n}\sum_{i=1}^n x_i(y_i - ax_i - b) = 0\] \[\implies a = \frac{\sum_i x_i y_i - n\bar{x}\bar{y}}{\sum_i x_i^2 - n\bar{x}^2}\]
Sample optimization gives sample LMMSE
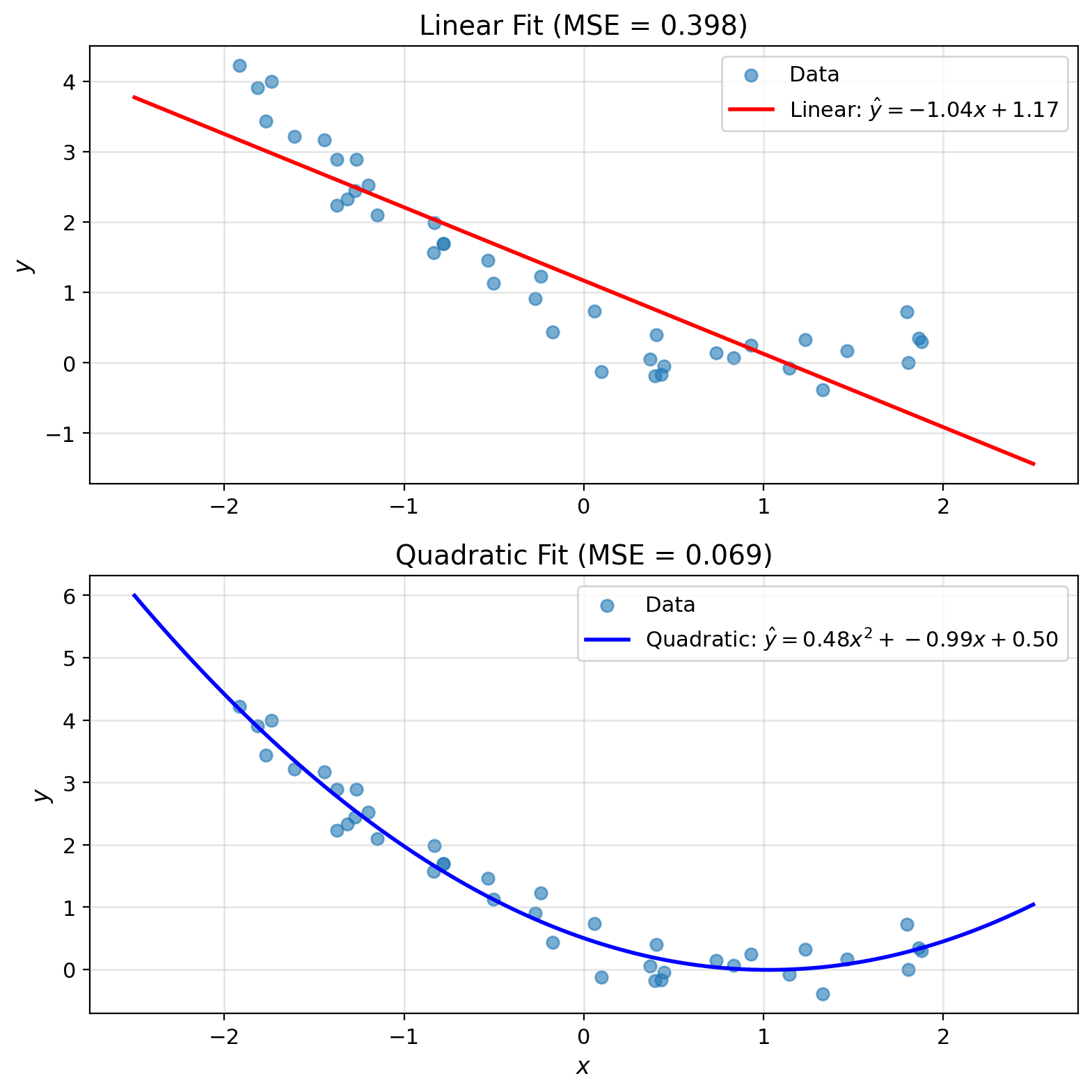
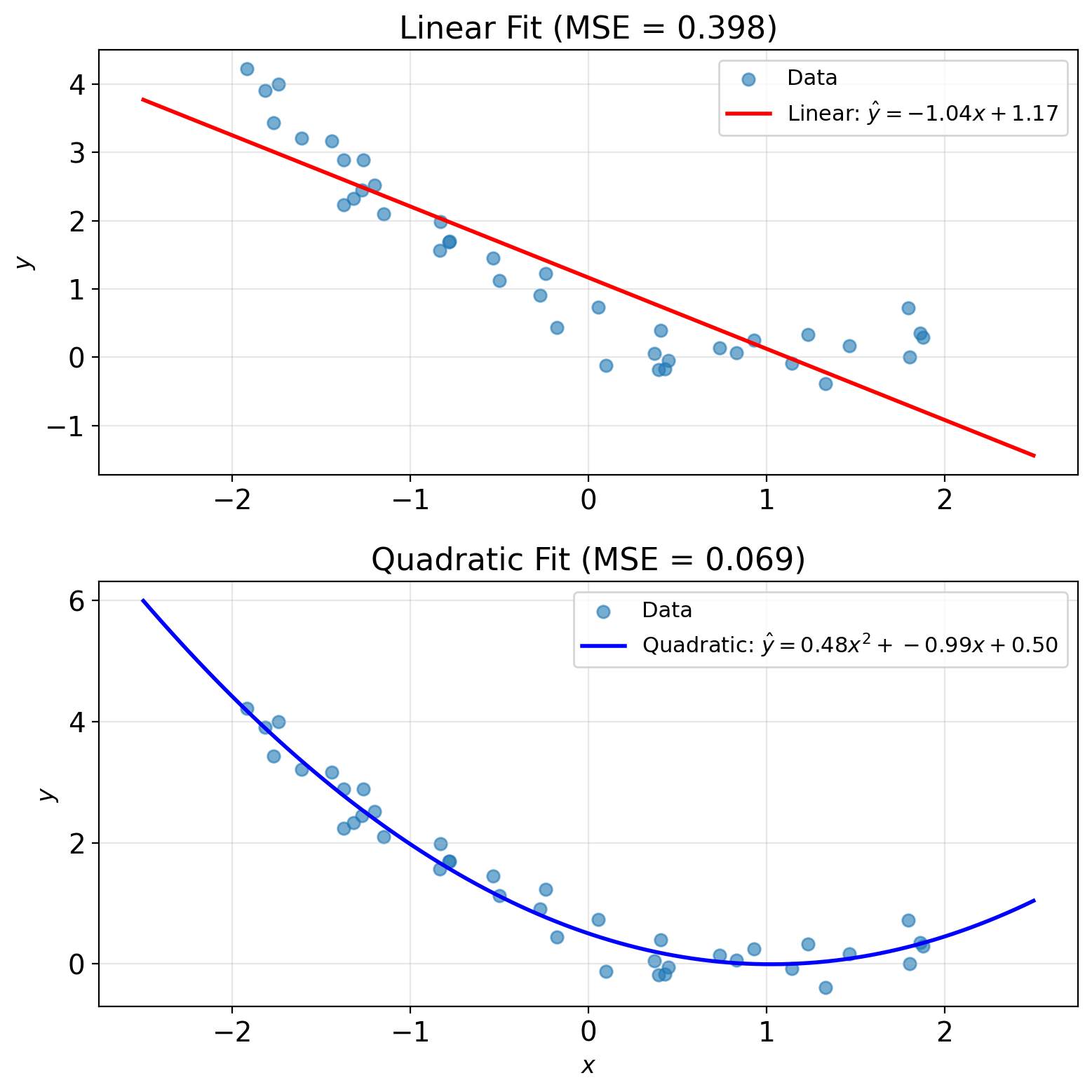
Feature Maps Enable Nonlinear Fits
Linear model limitations: \[\hat{y} = ax + b\]
Can only model linear relationships
Feature transformation: \[\hat{y} = \sum_{k=0}^{K} w_k \phi_k(x) = \mathbf{w}^T \boldsymbol{\phi}(x)\]
where \(\boldsymbol{\phi}(x) = [\phi_0(x), \phi_1(x), ..., \phi_K(x)]^T\)
Still linear MMSE in feature space:
- Design matrix: \(\Phi_{ij} = \phi_j(x_i)\)
- Solution: \(\mathbf{w}^* = (\Phi^T\Phi)^{-1}\Phi^T\mathbf{y}\)
Example: Polynomial features \[\phi_0(x) = 1, \quad \phi_1(x) = x, \quad \phi_2(x) = x^2\]
Now can fit parabolas while still using linear methods
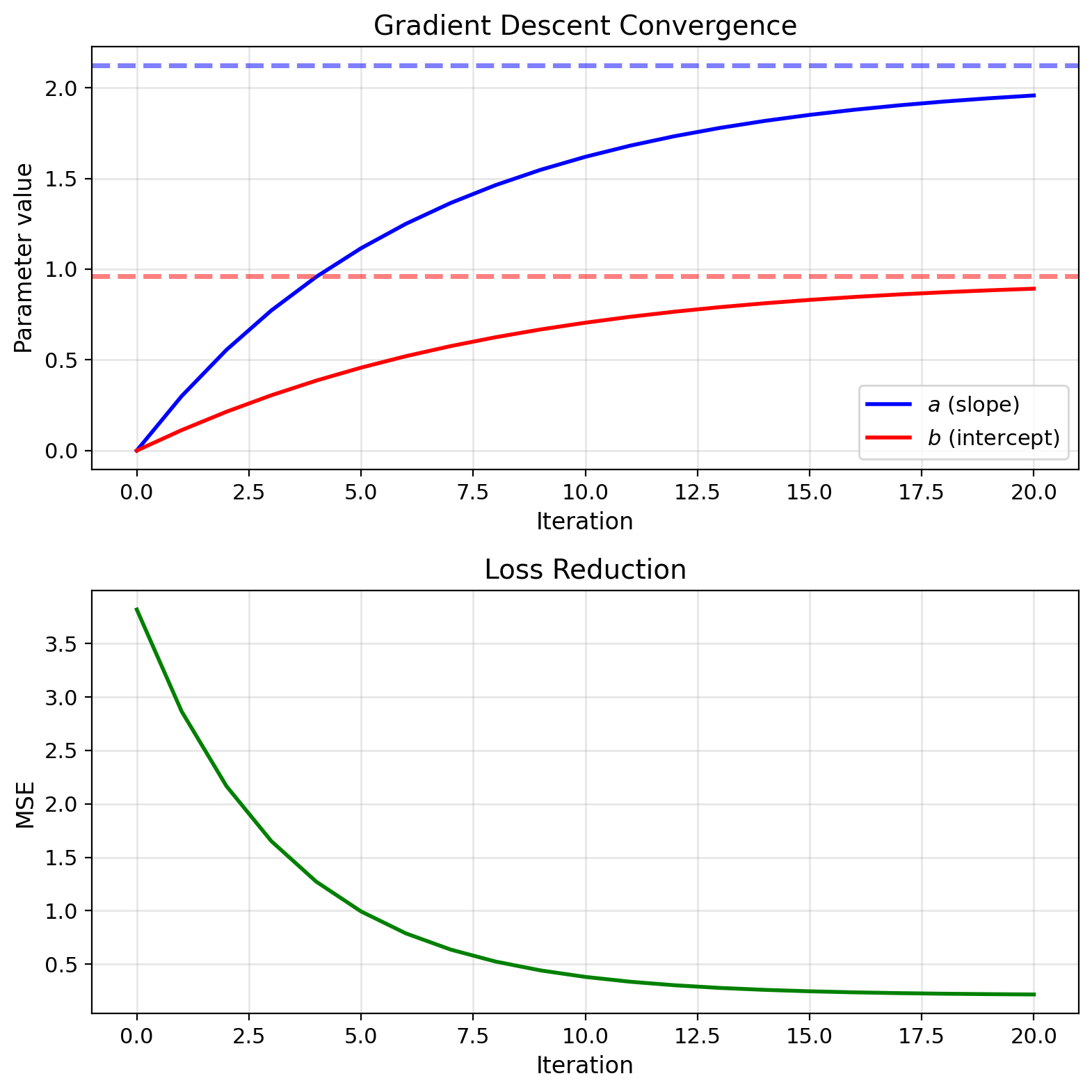
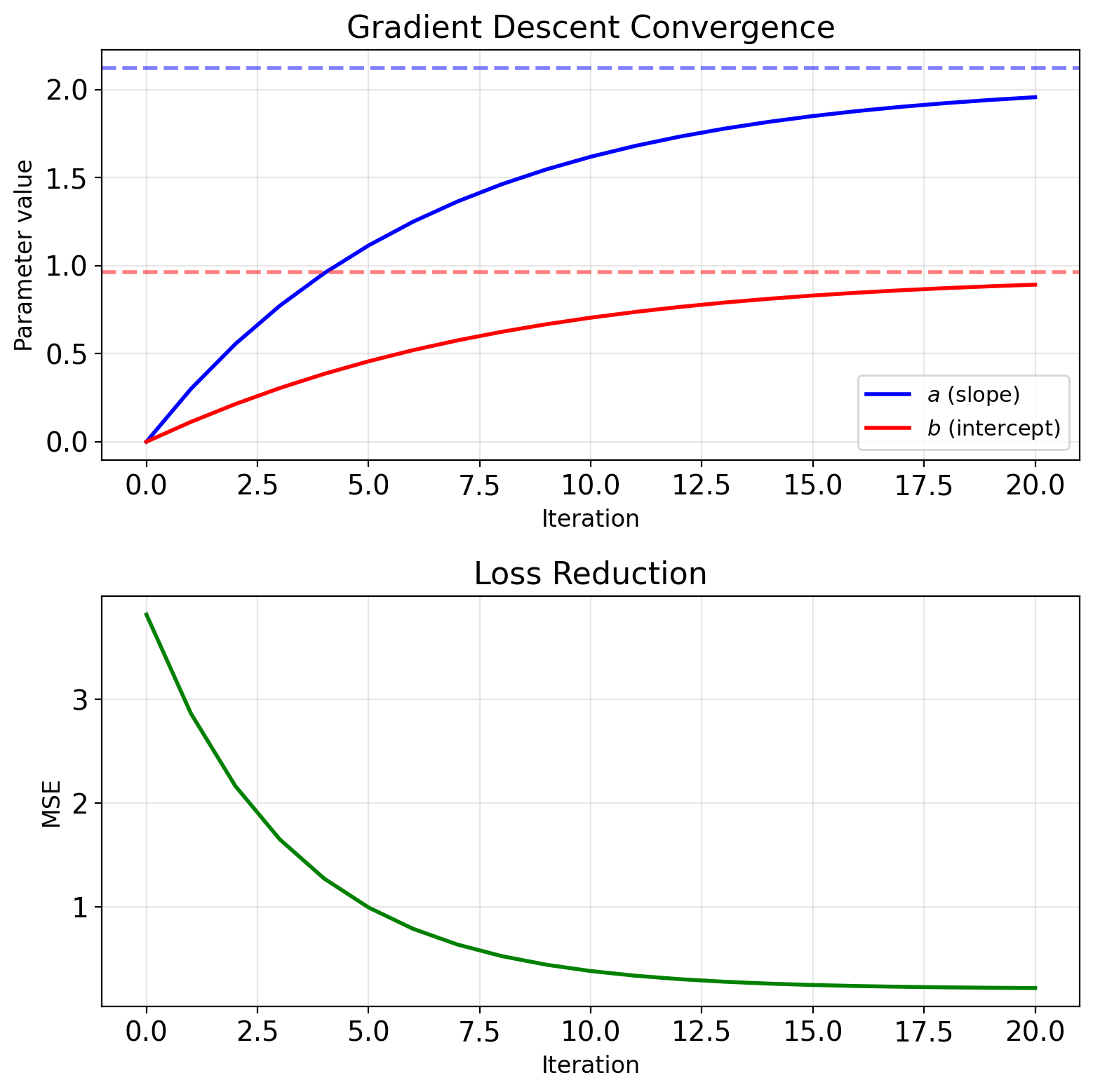
Gradient Descent Recovers LMMSE Iteratively
Batch gradient descent: \[J(a,b) = \frac{1}{n}\sum_{i=1}^n (y_i - ax_i - b)^2\]
Gradients: \[\frac{\partial J}{\partial a} = -\frac{2}{n}\sum_{i=1}^n x_i(y_i - ax_i - b)\] \[\frac{\partial J}{\partial b} = -\frac{2}{n}\sum_{i=1}^n (y_i - ax_i - b)\]
Update: \[a_{t+1} = a_t - \eta \frac{\partial J}{\partial a}\] \[b_{t+1} = b_t - \eta \frac{\partial J}{\partial b}\]
Stochastic version (one sample): \[a_{t+1} = a_t + \eta x_i (y_i - a_t x_i - b_t)\] \[b_{t+1} = b_t + \eta (y_i - a_t x_i - b_t)\]
This is LMS algorithm (Widrow-Hoff)
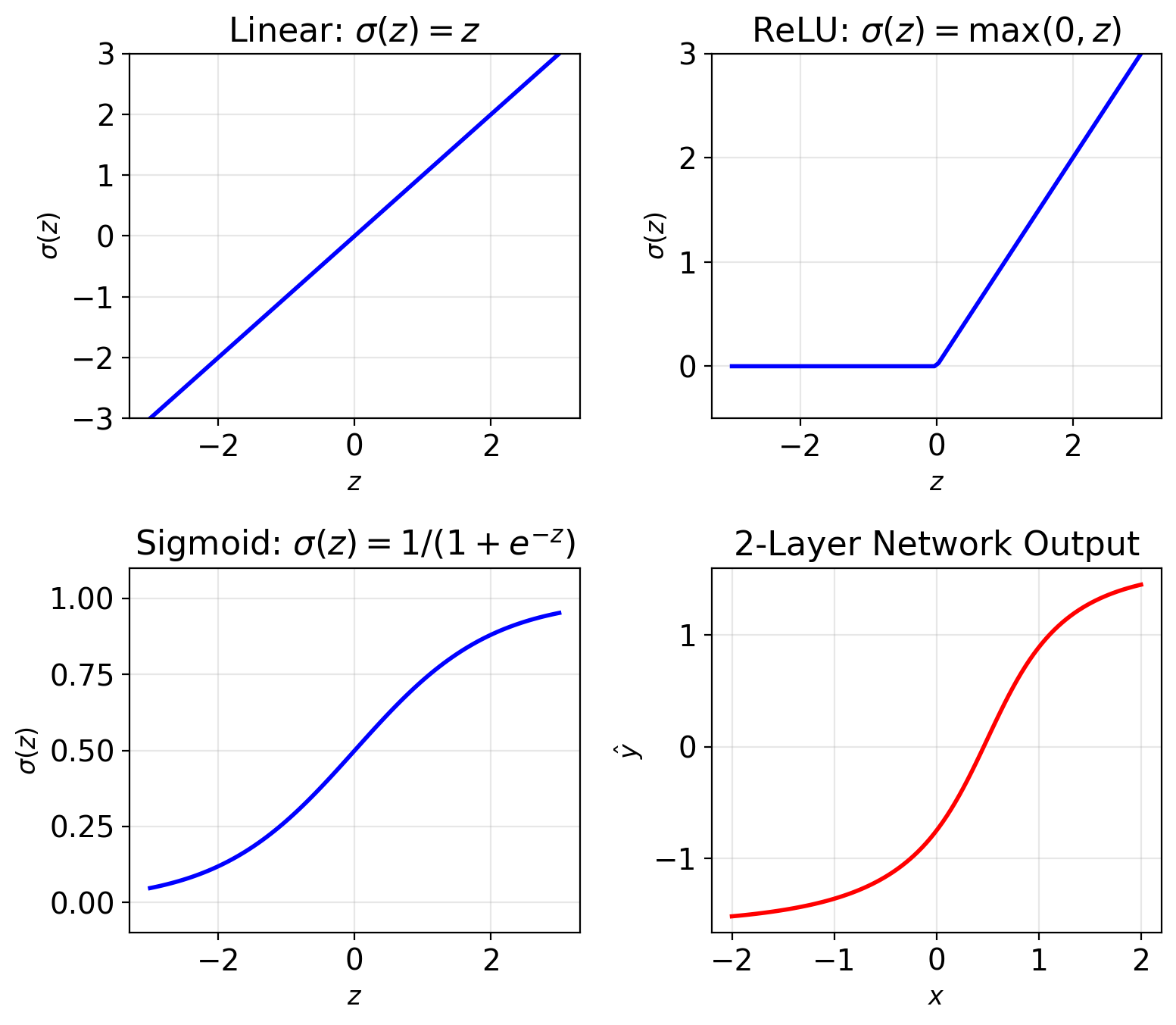
Neural Networks Compose Linear Maps + Nonlinearities
LMMSE ≠ MMSE when \(\mathbb{E}[Y|X]\) is nonlinear.
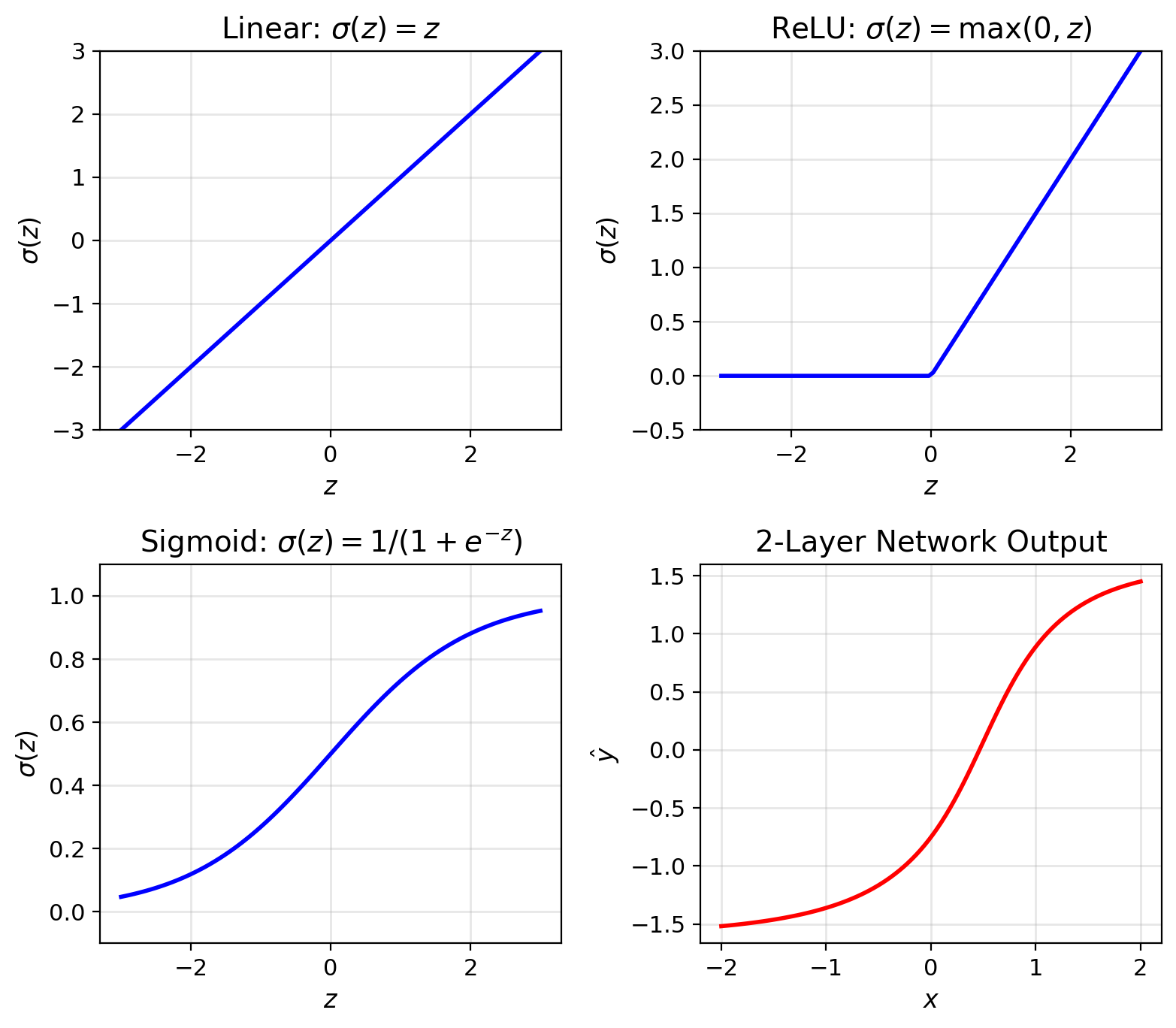
Single neuron: \[z = \mathbf{w}^T\mathbf{x} + b\] \[h = \sigma(z)\]
where \(\sigma\) is activation (ReLU, sigmoid, etc.)
Without activation: Linear regression \[\hat{y} = \mathbf{w}^T\mathbf{x} + b\]
With activation: Nonlinear transform \[\hat{y} = \sigma(\mathbf{w}^T\mathbf{x} + b)\]
Deep network: Composition of layers \[\mathbf{h}^{(1)} = \sigma(W^{(1)}\mathbf{x} + \mathbf{b}^{(1)})\] \[\mathbf{h}^{(2)} = \sigma(W^{(2)}\mathbf{h}^{(1)} + \mathbf{b}^{(2)})\] \[\hat{y} = W^{(L)}\mathbf{h}^{(L-1)} + b^{(L)}\]
Objective: \(\frac{1}{n}\sum_i (y_i - \hat{y}_i)^2\) (same MSE)
Backpropagation: Chain rule for gradients
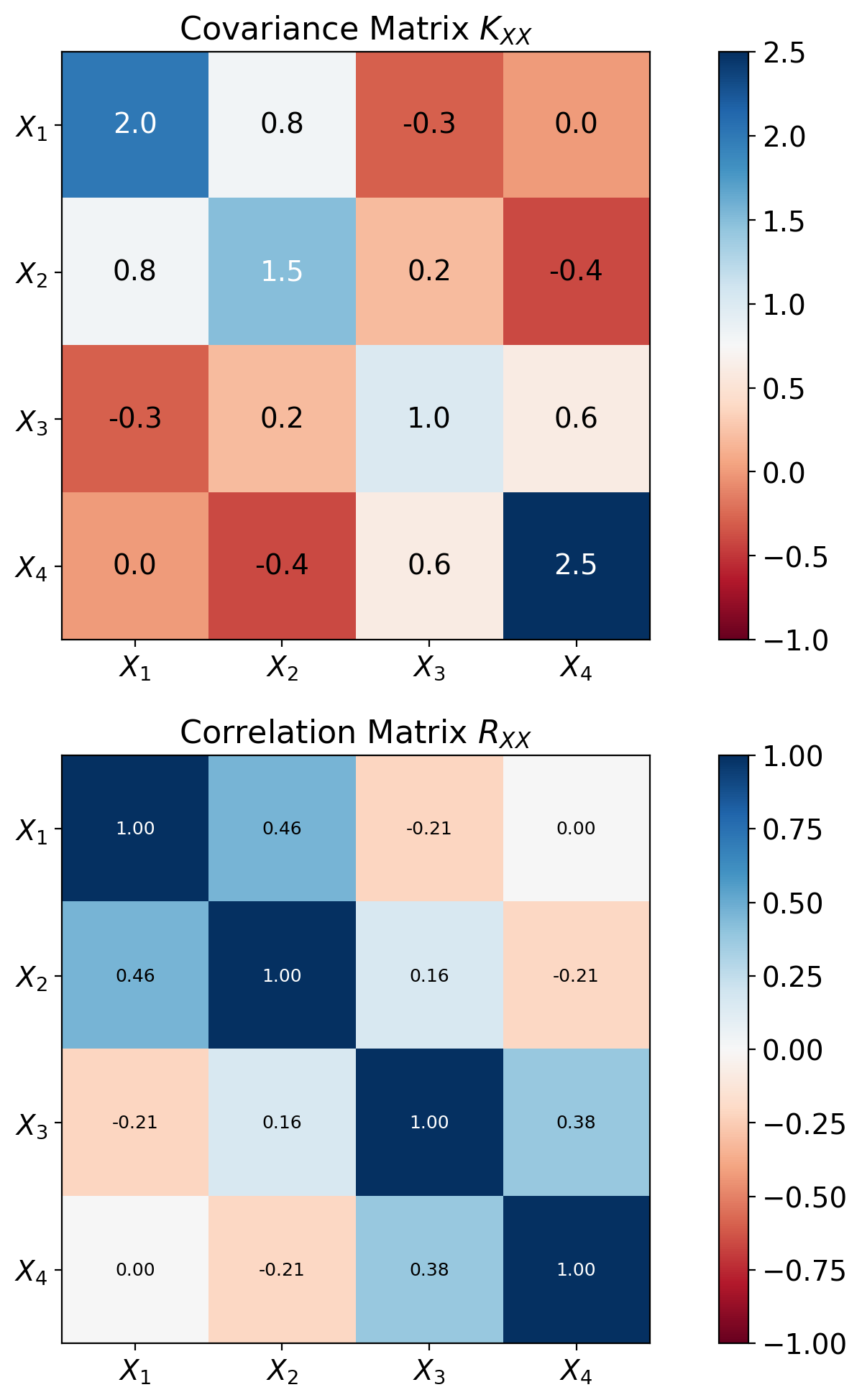
Covariance Matrices Encode Pairwise Relationships
Random vector: \(\mathbf{X} = [X_1, X_2, ..., X_n]^T\)
Mean vector: \[\boldsymbol{\mu} = \mathbb{E}[\mathbf{X}] = \begin{bmatrix} \mathbb{E}[X_1] \\ \mathbb{E}[X_2] \\ \vdots \\ \mathbb{E}[X_n] \end{bmatrix}\]
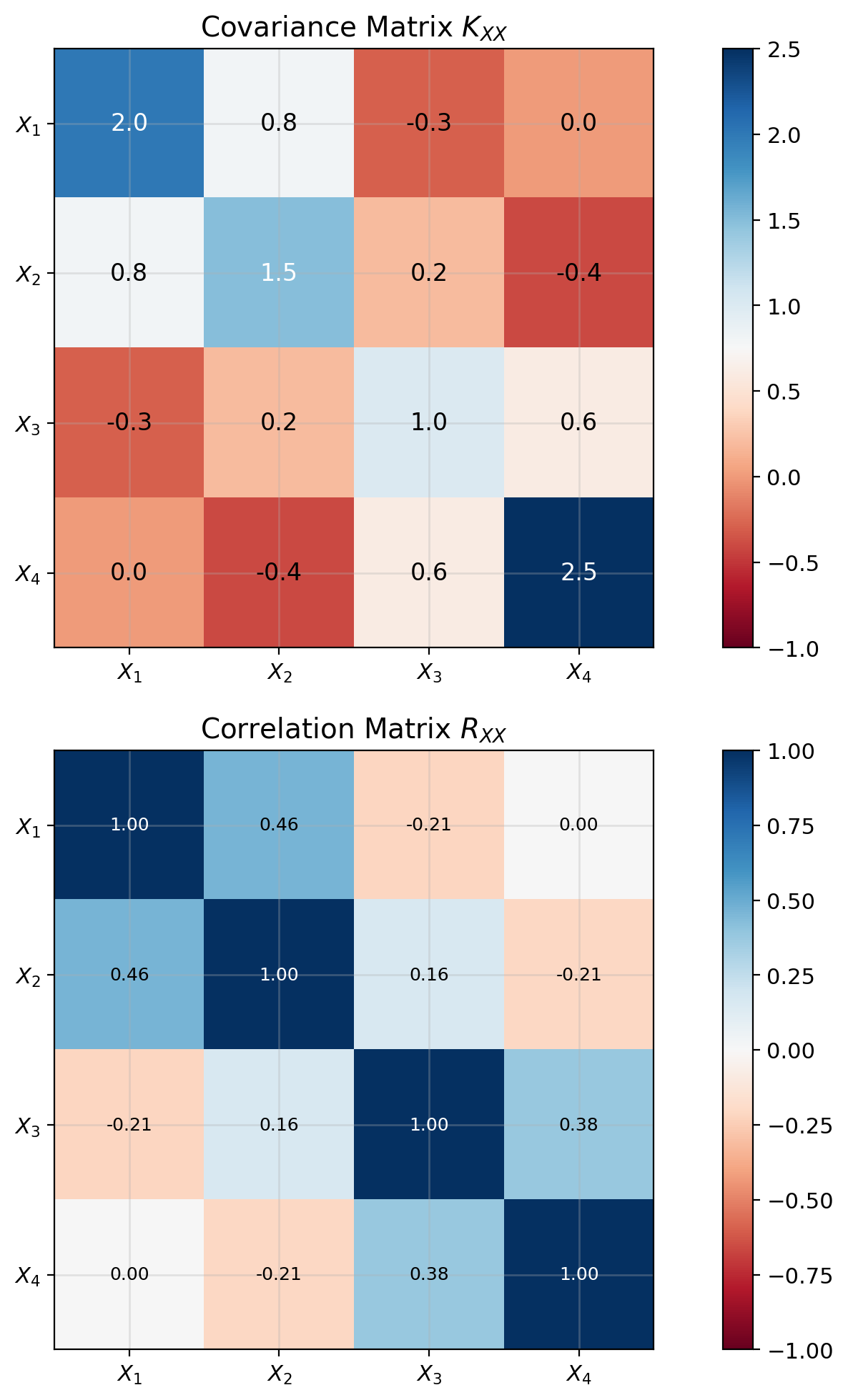
Covariance matrix: \[K_{\mathbf{XX}} = \mathbb{E}[(\mathbf{X} - \boldsymbol{\mu})(\mathbf{X} - \boldsymbol{\mu})^T]\]
Element structure: \[[K_{\mathbf{XX}}]_{ij} = \text{Cov}(X_i, X_j) = \mathbb{E}[(X_i - \mu_i)(X_j - \mu_j)]\]
Properties:
- Symmetric: \(K_{\mathbf{XX}} = K_{\mathbf{XX}}^T\)
- Positive semi-definite: \(\mathbf{a}^T K_{\mathbf{XX}} \mathbf{a} \geq 0\)
- Diagonal elements = variances
- Off-diagonal = covariances
Gaussian Vectors Are Closed Under Linear Transforms
Joint Gaussian distribution:
\(\begin{bmatrix} \mathbf{X} \\ \mathbf{Y} \end{bmatrix} \sim \mathcal{N}\left(\begin{bmatrix} \boldsymbol{\mu}_X \\ \boldsymbol{\mu}_Y \end{bmatrix}, \begin{bmatrix} K_{XX} & K_{XY} \\ K_{YX} & K_{YY} \end{bmatrix}\right)\)
Probability density: \[p(\mathbf{x}, \mathbf{y}) = \frac{1}{(2\pi)^{(n+m)/2}|K|^{1/2}} \exp\left(-\frac{1}{2}\mathbf{z}^TK^{-1}\mathbf{z}\right)\]
where \(\mathbf{z} = \begin{bmatrix} \mathbf{x} - \boldsymbol{\mu}_X \\ \mathbf{y} - \boldsymbol{\mu}_Y \end{bmatrix}\)
Linear operations preserve Gaussianity
If \(\mathbf{Z} = A\mathbf{X} + \mathbf{b}\), then: \[\mathbf{Z} \sim \mathcal{N}(A\boldsymbol{\mu}_X + \mathbf{b}, AK_{XX}A^T)\]
Marginals are Gaussian: \[\mathbf{X} \sim \mathcal{N}(\boldsymbol{\mu}_X, K_{XX})\]
Gaussian Conditional Mean Uses Schur Complement
Given joint Gaussian, conditional is also Gaussian:
\[\mathbf{X}|\mathbf{Y} = \mathbf{y} \sim \mathcal{N}(\boldsymbol{\mu}_{X|Y}, K_{X|Y})\]
Conditional mean (MMSE estimator): \[\boldsymbol{\mu}_{X|Y} = \boldsymbol{\mu}_X + K_{XY}K_{YY}^{-1}(\mathbf{y} - \boldsymbol{\mu}_Y)\]
Conditional covariance (error covariance): \[K_{X|Y} = K_{XX} - K_{XY}K_{YY}^{-1}K_{YX}\]
Observations:
- Conditional mean is linear in \(\mathbf{y}\)
- Conditional covariance doesn’t depend on \(\mathbf{y}\)
- For Gaussian: MMSE = Linear MMSE
Schur complement: \[K_{X|Y} = K_{XX} - K_{XY}K_{YY}^{-1}K_{YX}\] measures reduction in uncertainty
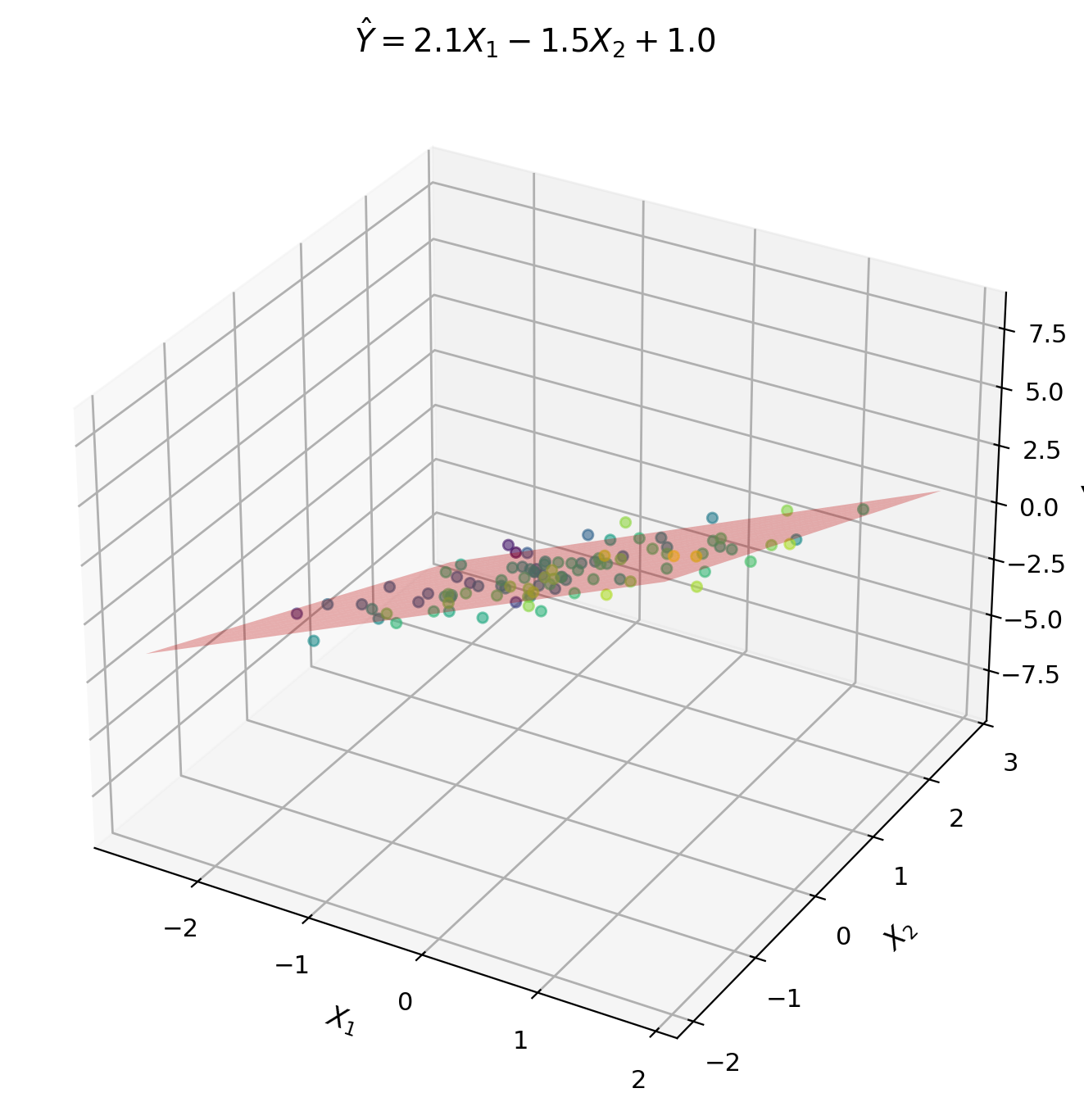
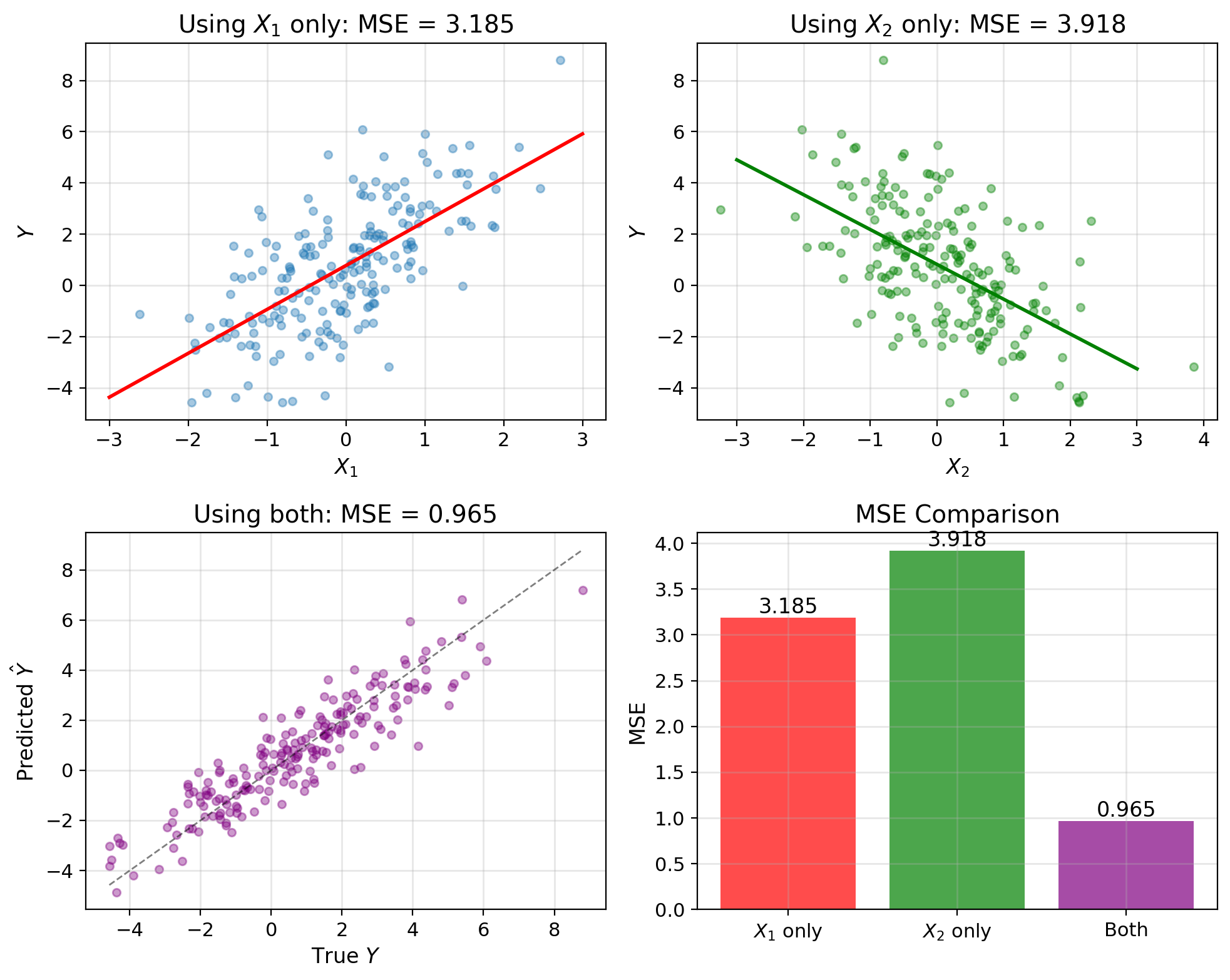
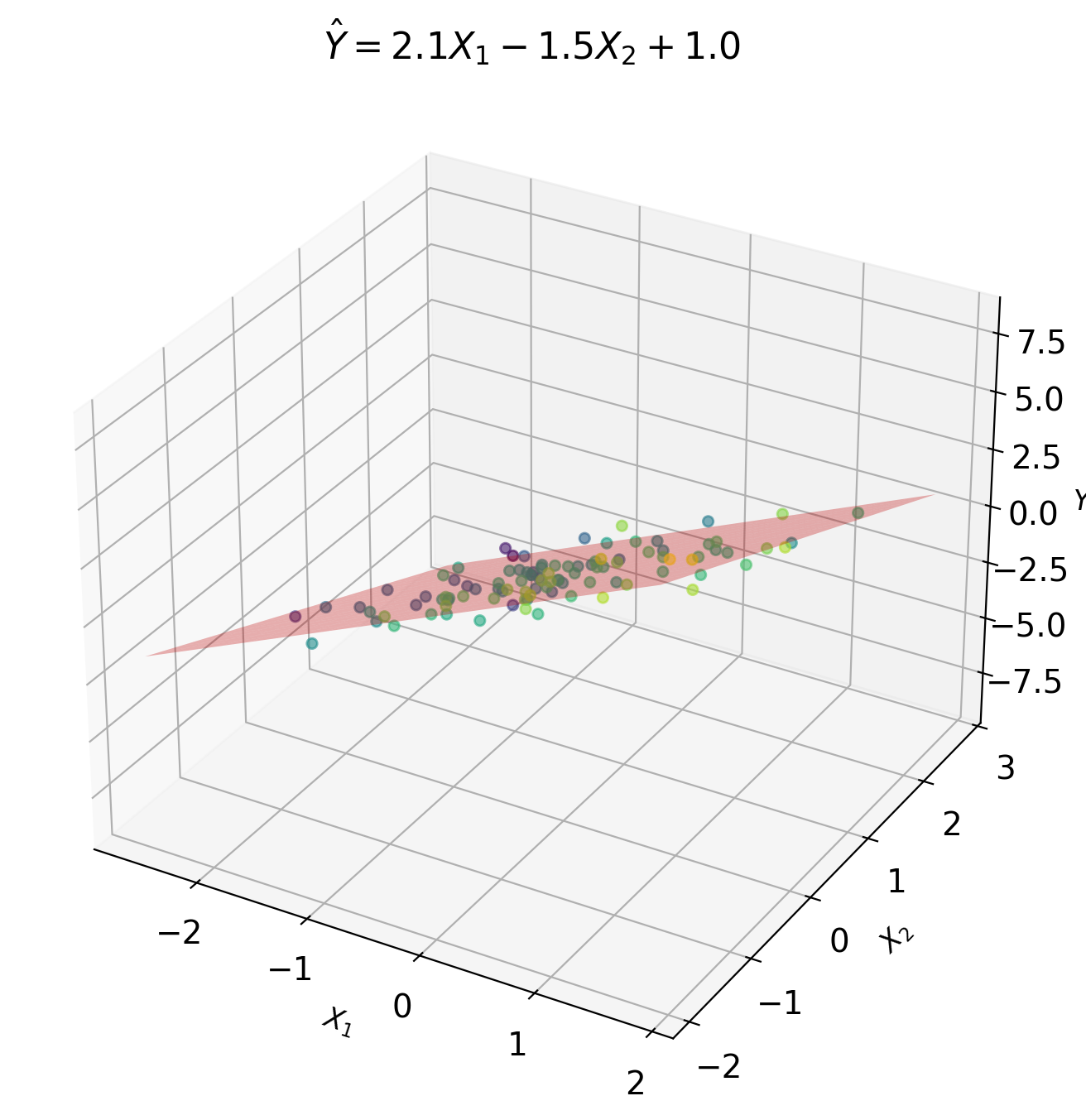
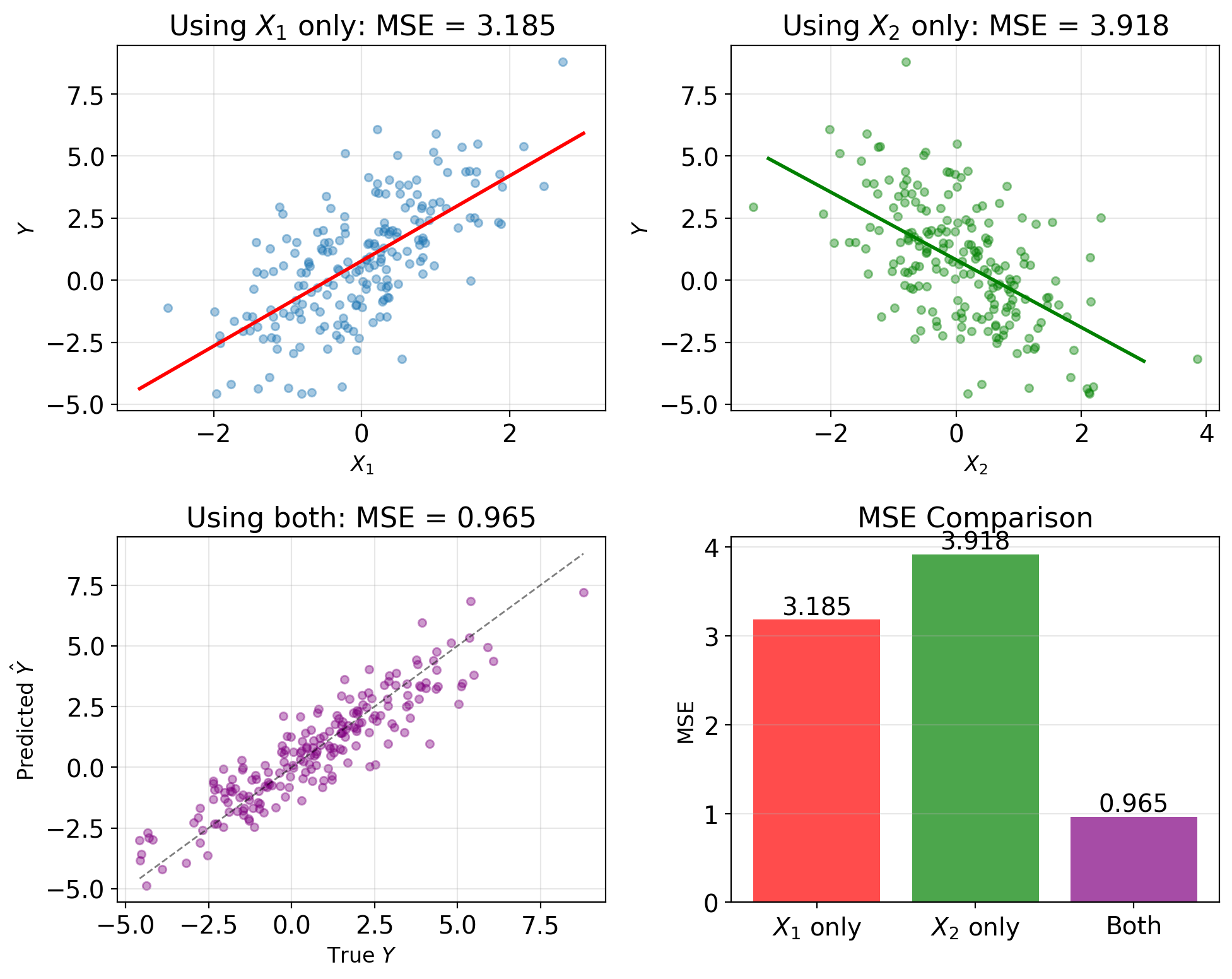
Combining Predictors Always Beats Any Single One
Scalar case: \[\hat{Y} = aX + b\]
Given: \(X\) (single predictor), predict \(Y\)
Vector case: \[\hat{Y} = \mathbf{a}^T\mathbf{X} + b\]
Given: \(\mathbf{X} = [X_1, X_2, ..., X_p]^T\) (multiple predictors)
Example: Predict temperature \(Y\) from:
- \(X_1\) = humidity sensor
- \(X_2\) = pressure sensor
- \(X_3\) = wind speed
Matrix notation: \[\hat{Y} = \mathbf{a}^T\mathbf{X} + b = \sum_{j=1}^p a_j X_j + b\]
where \(\mathbf{a} = [a_1, a_2, ..., a_p]^T\) are weights
Vector LMMSE Minimizes a Quadratic in a
Minimize MSE over linear predictors: \[\text{MSE}(\mathbf{a}, b) = \mathbb{E}[(Y - \mathbf{a}^T\mathbf{X} - b)^2]\]
Taking derivatives:
\[\frac{\partial \text{MSE}}{\partial b} = -2\mathbb{E}[Y - \mathbf{a}^T\mathbf{X} - b] = 0\] \[\implies b = \mathbb{E}[Y] - \mathbf{a}^T\mathbb{E}[\mathbf{X}]\]
\[\frac{\partial \text{MSE}}{\partial \mathbf{a}} = -2\mathbb{E}[\mathbf{X}(Y - \mathbf{a}^T\mathbf{X} - b)] = \mathbf{0}\]
Substituting \(b\) and simplifying: \[\mathbb{E}[\mathbf{X}\mathbf{X}^T]\mathbf{a} = \mathbb{E}[\mathbf{X}Y] - \mathbb{E}[\mathbf{X}]\mathbb{E}[Y]\]
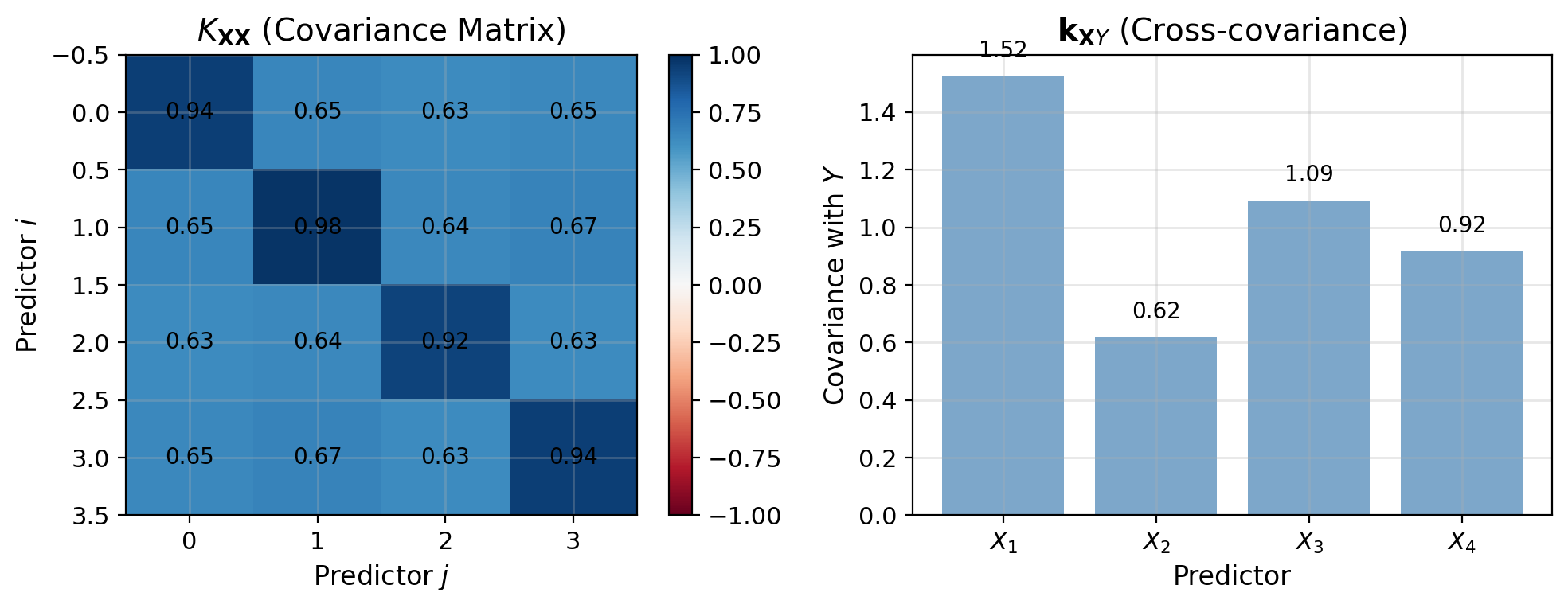
Define:
- \(K_{\mathbf{XX}} = \mathbb{E}[\mathbf{X}\mathbf{X}^T] - \mathbb{E}[\mathbf{X}]\mathbb{E}[\mathbf{X}]^T\) (covariance matrix)
- \(\mathbf{k}_{\mathbf{X}Y} = \mathbb{E}[\mathbf{X}Y] - \mathbb{E}[\mathbf{X}]\mathbb{E}[Y]\) (cross-covariance vector)
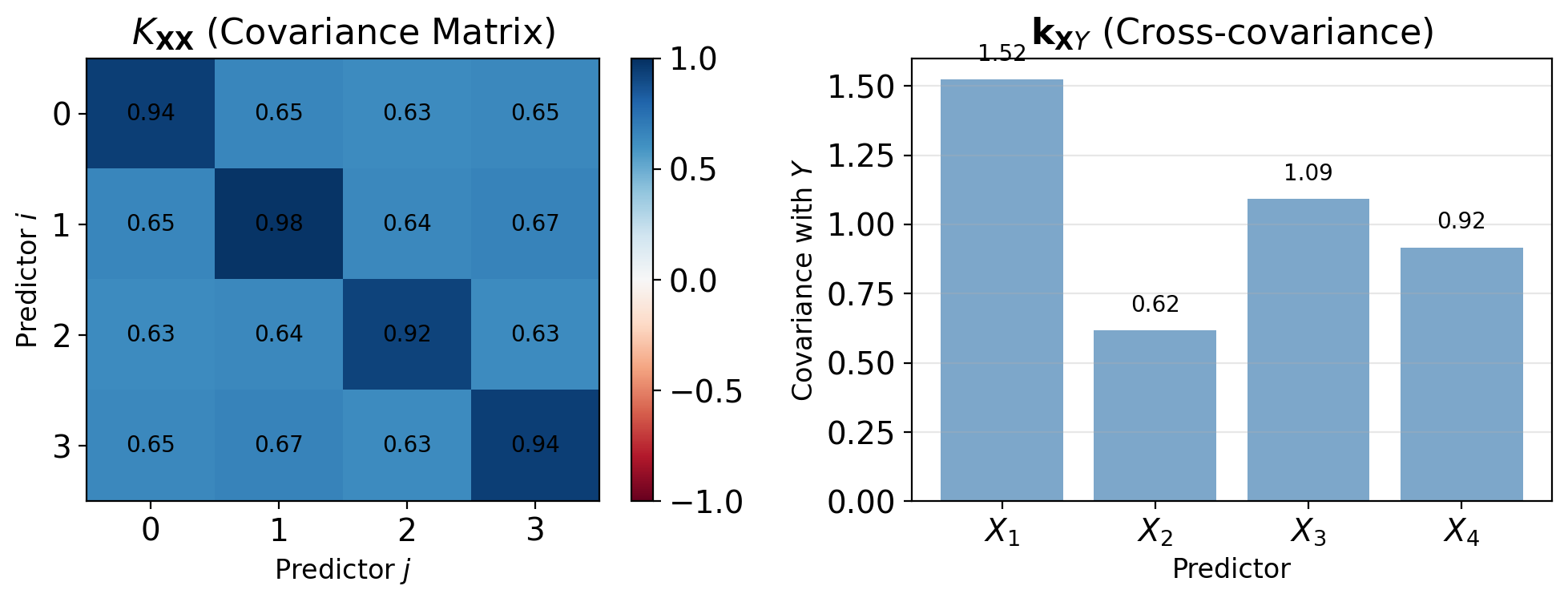
Normal Equations: \(K_{XX} \mathbf{a} = \mathbf{k}_{XY}\)
Normal equations: \[K_{\mathbf{XX}}\mathbf{a} = \mathbf{k}_{\mathbf{X}Y}\]
Solution (if \(K_{\mathbf{XX}}\) invertible): \[\mathbf{a}^* = K_{\mathbf{XX}}^{-1}\mathbf{k}_{\mathbf{X}Y}\] \[b^* = \mathbb{E}[Y] - (\mathbf{a}^*)^T\mathbb{E}[\mathbf{X}]\]
LMMSE predictor: \[\hat{Y}_{\text{LMMSE}} = \mathbb{E}[Y] + (\mathbf{a}^*)^T(\mathbf{X} - \mathbb{E}[\mathbf{X}])\]
Minimum MSE: \[\text{MSE}_{\min} = \text{Var}(Y) - \mathbf{k}_{\mathbf{X}Y}^T K_{\mathbf{XX}}^{-1} \mathbf{k}_{\mathbf{X}Y}\]
Describes:
- Variance reduction = \(\mathbf{k}_{\mathbf{X}Y}^T K_{\mathbf{XX}}^{-1} \mathbf{k}_{\mathbf{X}Y}\)
- Measures how much \(\mathbf{X}\) helps predict \(Y\)
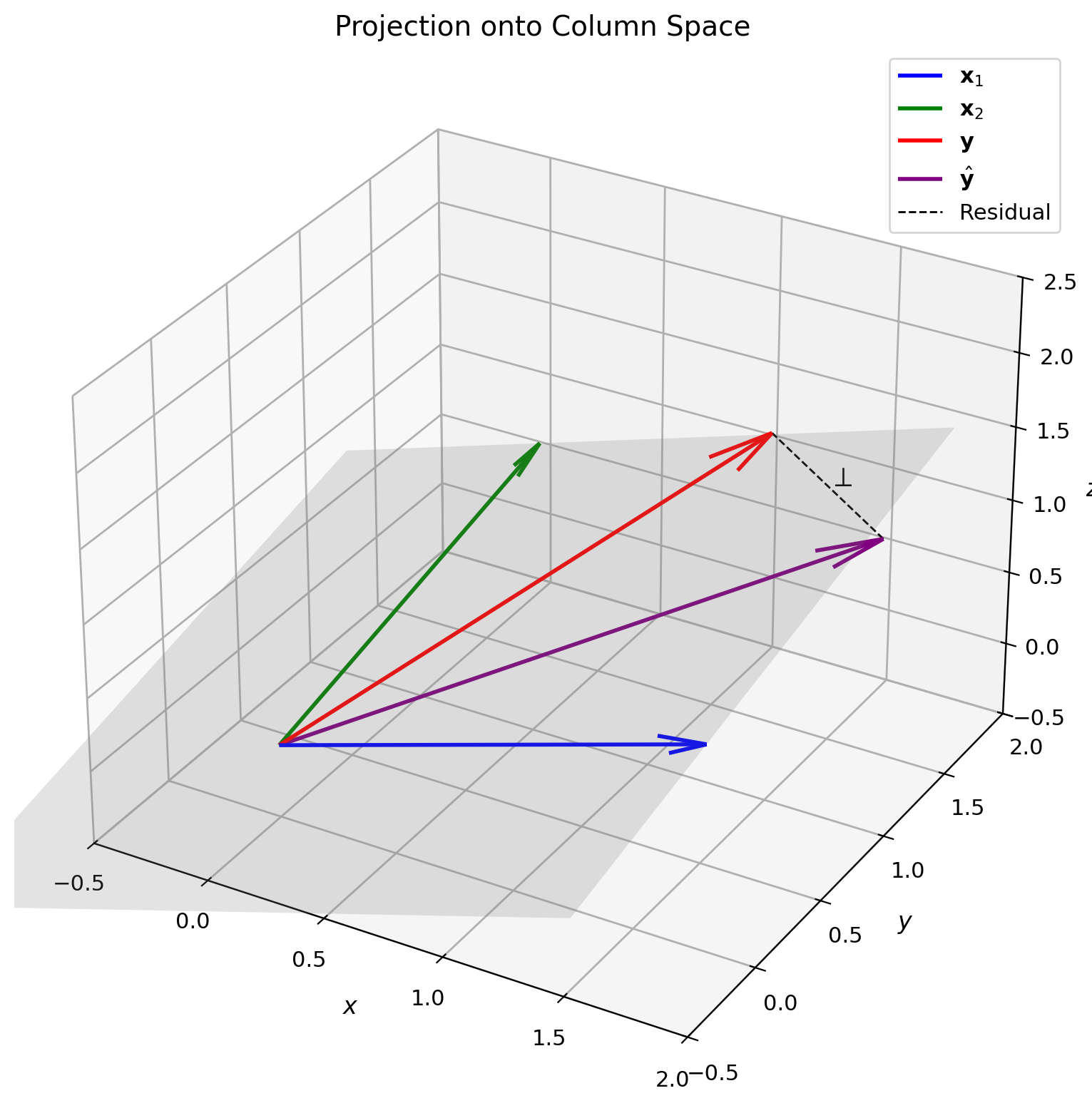
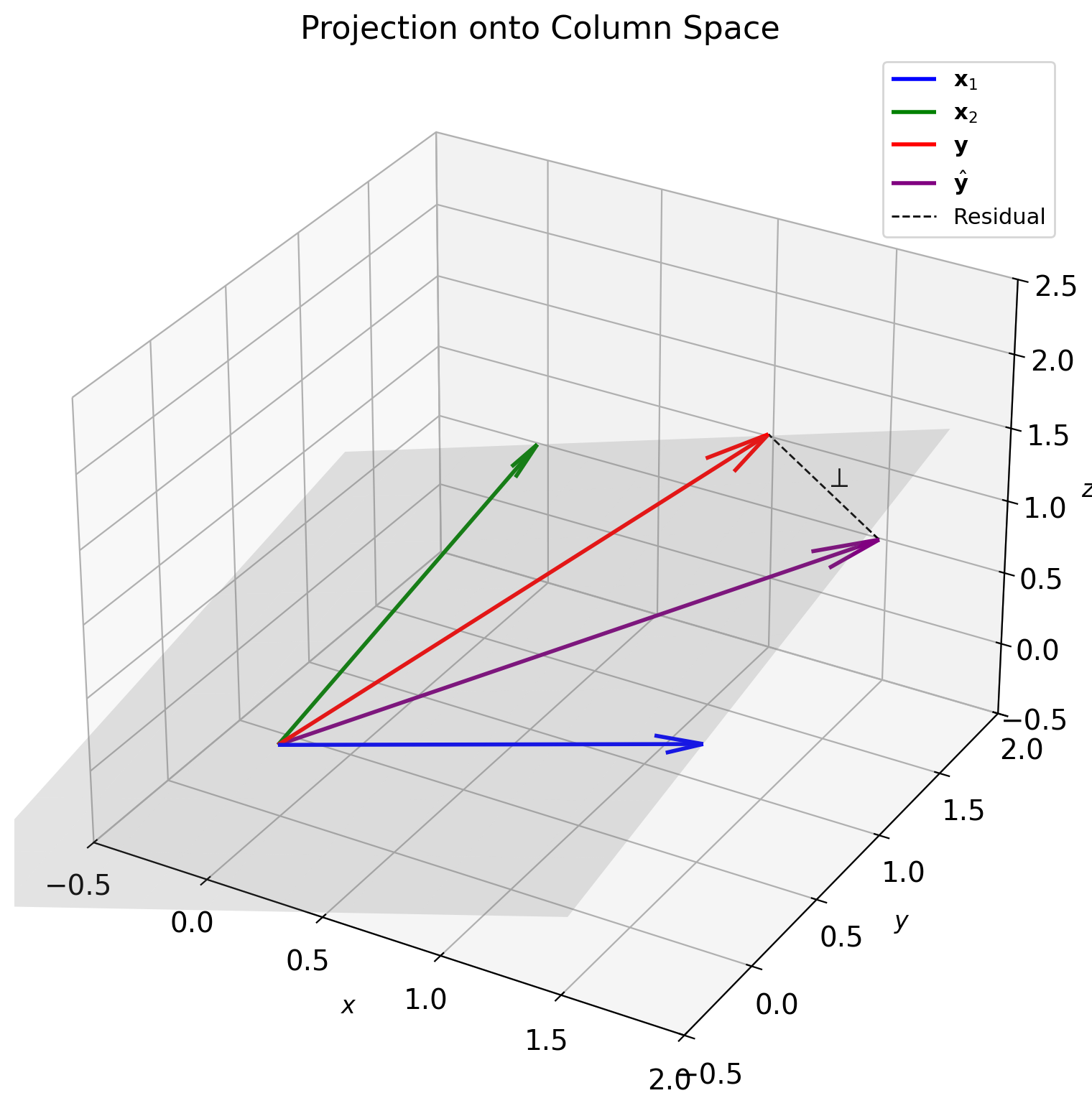
LMMSE = Projection onto Column Space
Column space perspective:
Data matrix columns: \(\mathbf{x}_1, \mathbf{x}_2, ..., \mathbf{x}_p\)
\[\mathcal{S} = \text{span}(\mathbf{x}_1, \mathbf{x}_2, ..., \mathbf{x}_p)\]
LMMSE = Projection: \[\hat{\mathbf{y}} = \text{Proj}_{\mathcal{S}}(\mathbf{y})\]
Orthogonality: \[\mathbf{y} - \hat{\mathbf{y}} \perp \mathcal{S}\]
Equivalently: \(X^T(\mathbf{y} - X\mathbf{a}) = \mathbf{0}\)
Projection matrix: \[P = X(X^TX)^{-1}X^T\] \[\hat{\mathbf{y}} = P\mathbf{y}\]
Properties:
- \(P^2 = P\) (idempotent)
- \(P^T = P\) (symmetric)
- \(\text{rank}(P) = p\) (dimension of \(\mathcal{S}\))
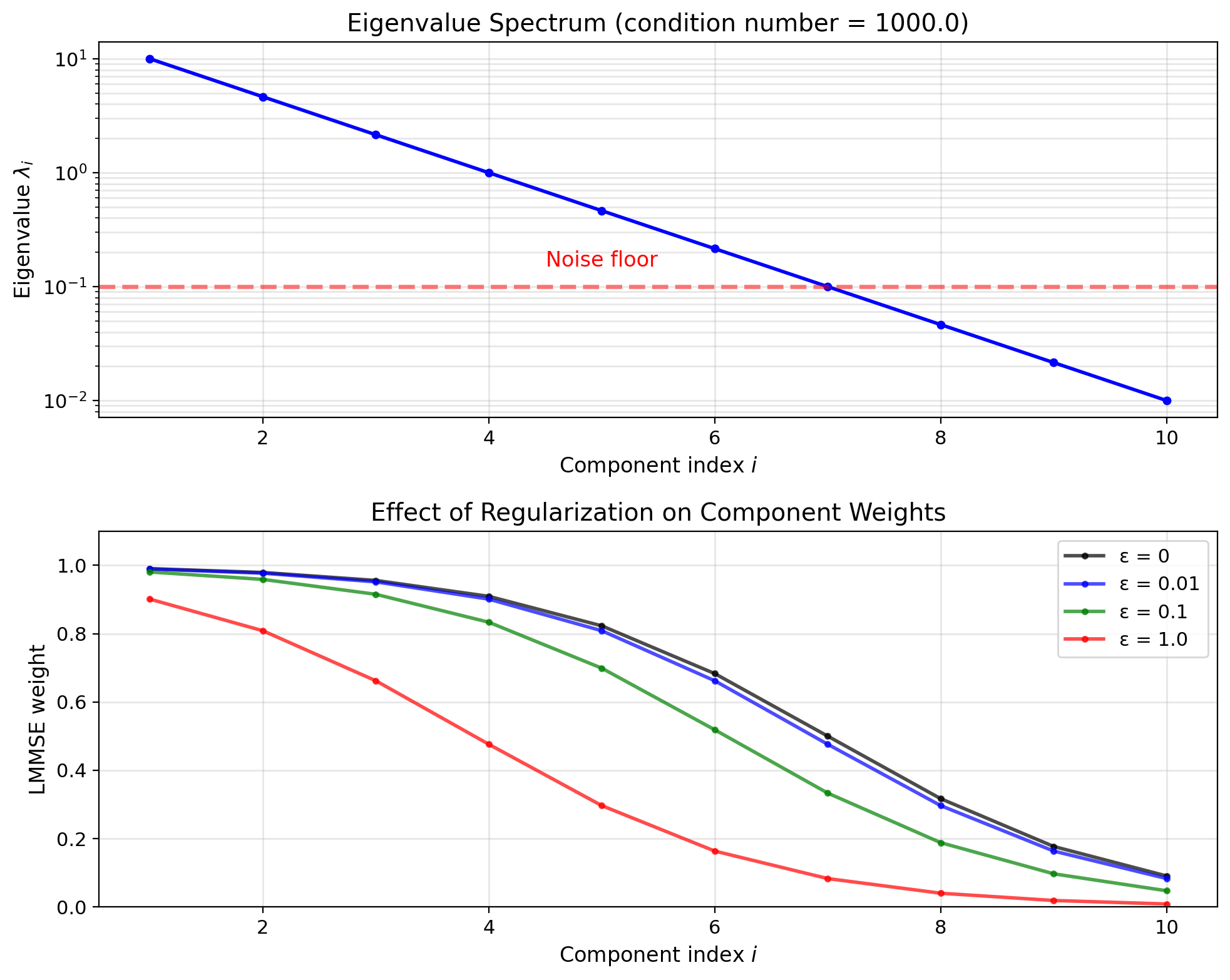
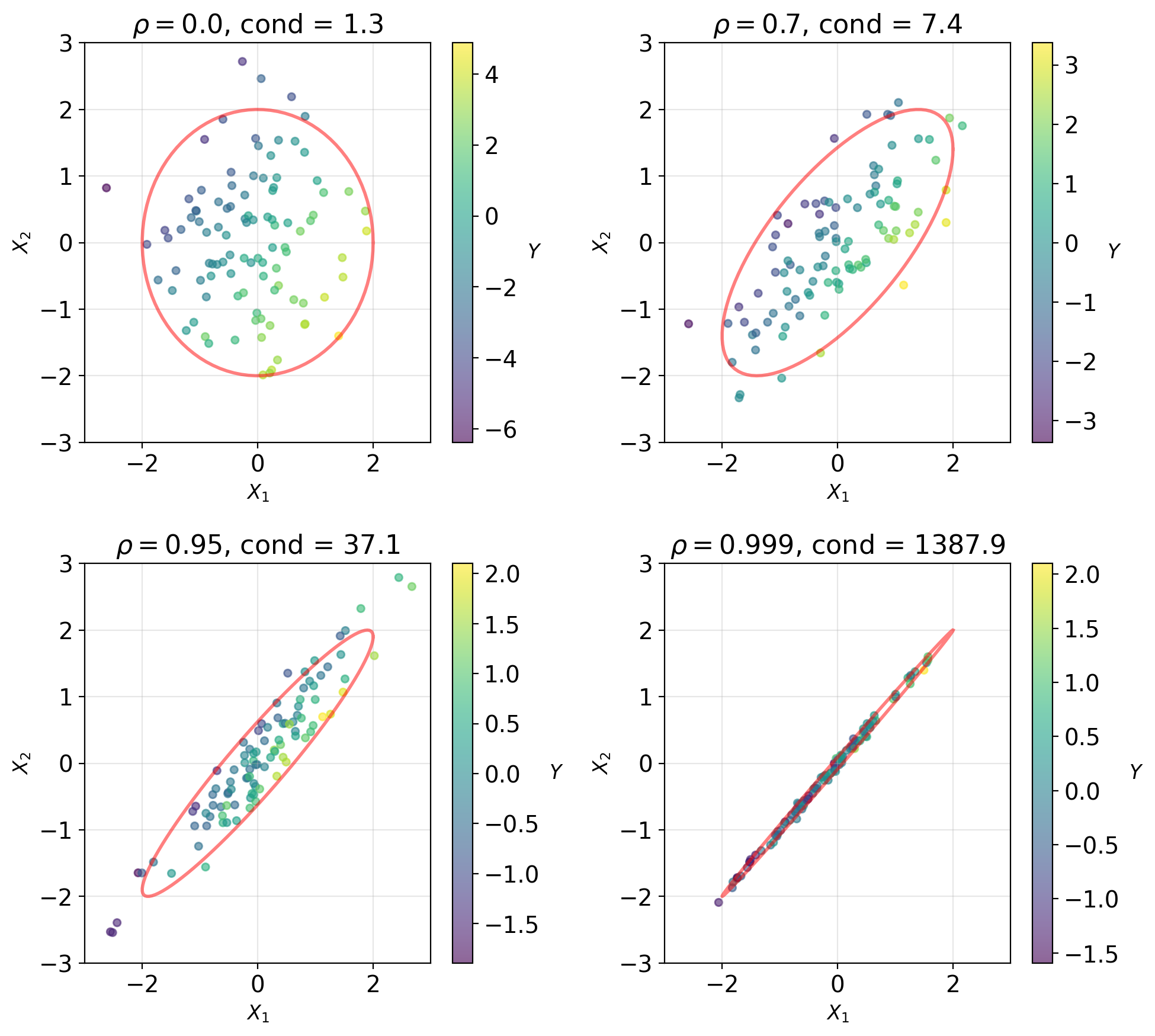
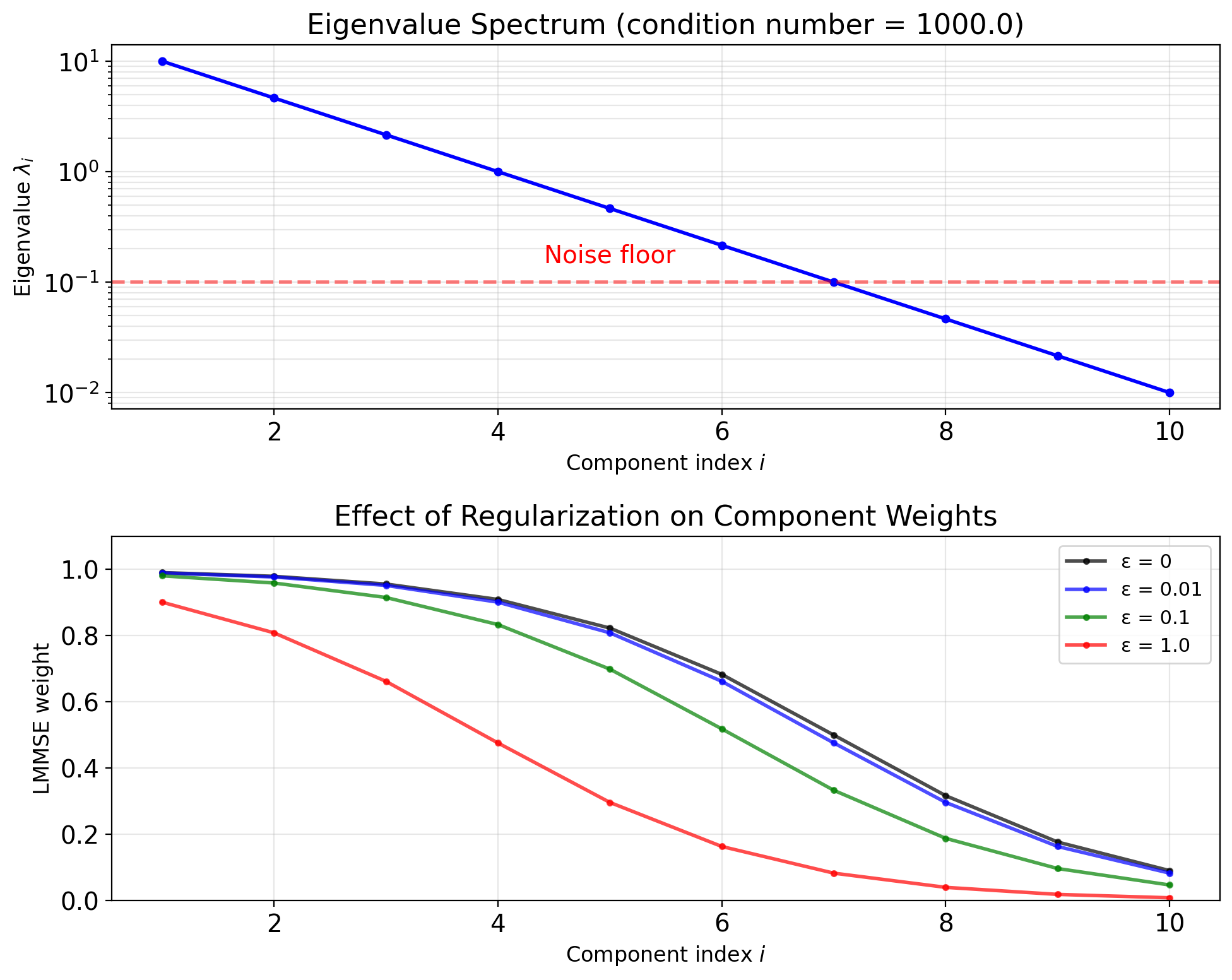
Collinearity Leads to Ill-Conditioned \(K_{XX}\)
Direct inversion issues:
Ill-conditioning: When predictors highly correlated
- \(\text{cond}(K_{\mathbf{XX}}) = \frac{\lambda_{\max}}{\lambda_{\min}} \gg 1\)
- Small changes → large parameter changes
Rank deficiency: When \(p > n\) or perfect collinearity
- \(K_{\mathbf{XX}}\) not invertible
- Infinitely many solutions
Solutions:
QR decomposition: \(X = QR\)
- More stable than normal equations
- \(\mathbf{a} = R^{-1}Q^T\mathbf{y}\)
SVD: \(X = U\Sigma V^T\)
- Handles rank-deficient cases
- Pseudoinverse: \(X^+ = V\Sigma^+ U^T\)
Regularization:
- Ridge: Add \(\lambda I\) to \(K_{\mathbf{XX}}\)
- Makes problem well-posed
- Trades bias for stability
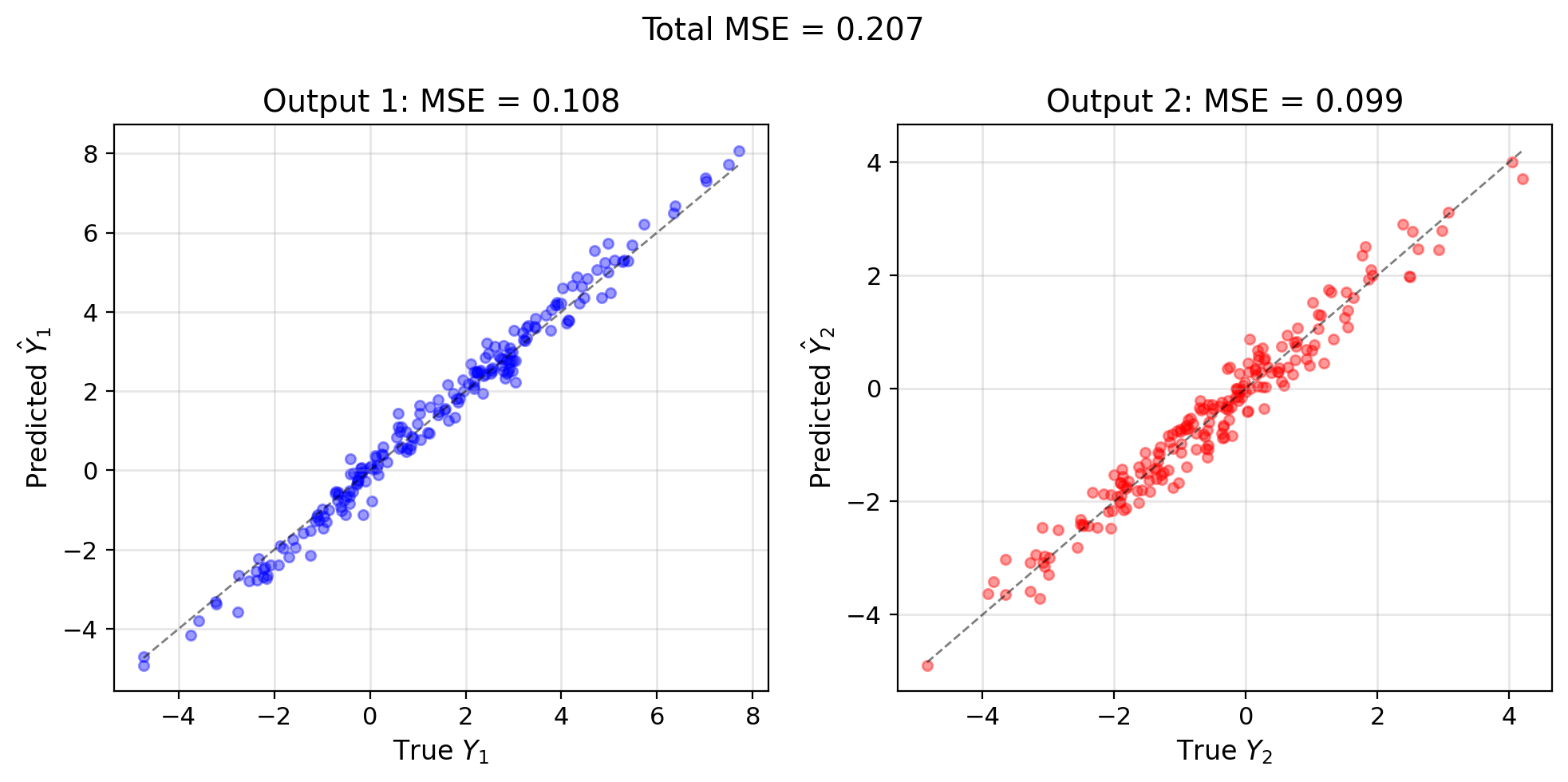
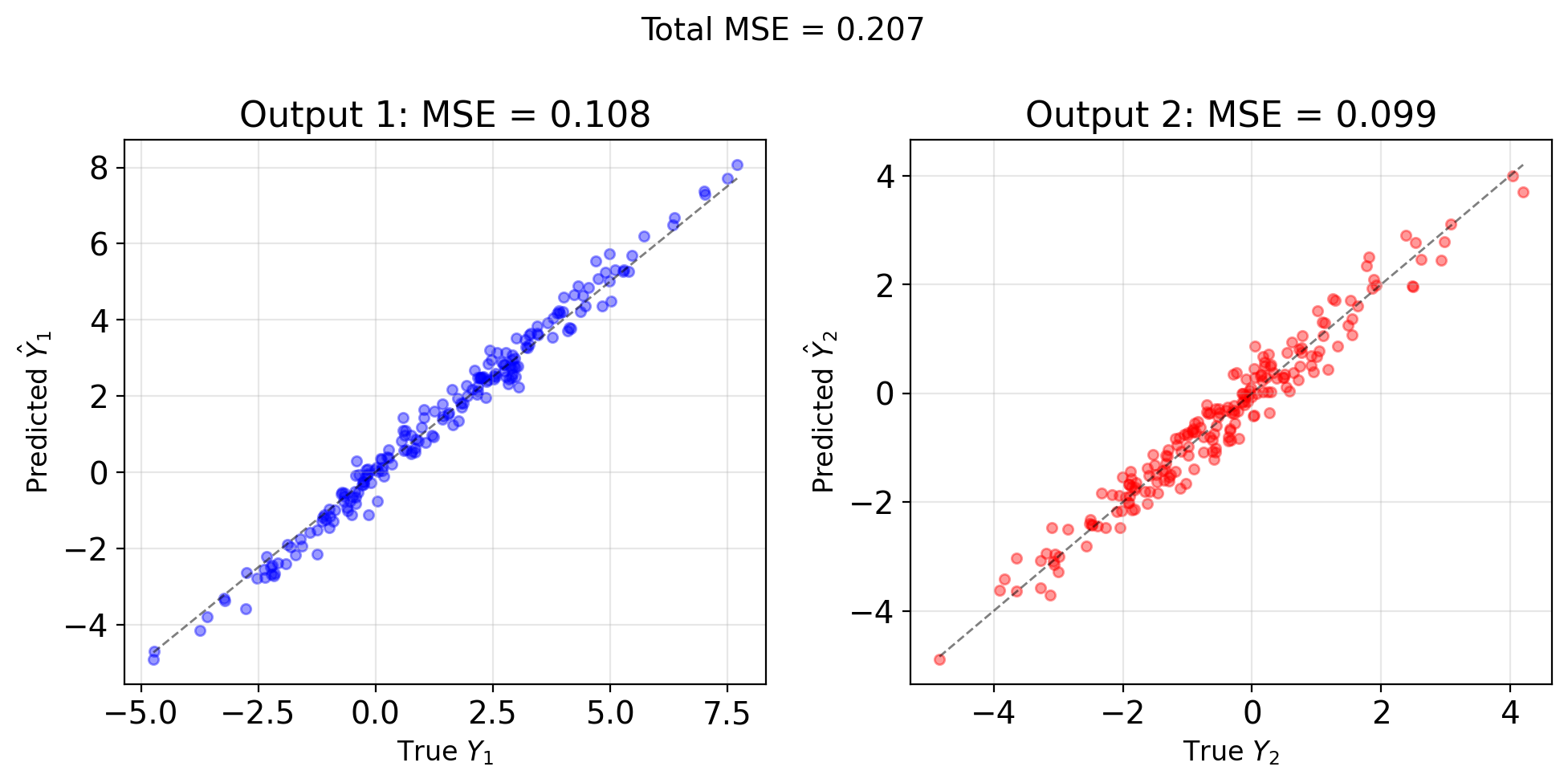
Multiple Outputs Decompose into Scalar Problems
Multiple responses: \[\mathbf{Y} = [Y_1, Y_2, ..., Y_m]^T\]
Linear model: \[\hat{\mathbf{Y}} = W^T\mathbf{X} + \mathbf{b}\]
where \(W \in \mathbb{R}^{p \times m}\) is weight matrix
MSE matrix: \[\mathbf{M} = \mathbb{E}[(\mathbf{Y} - \hat{\mathbf{Y}})(\mathbf{Y} - \hat{\mathbf{Y}})^T]\]
Minimize trace (total MSE): \[\text{tr}(\mathbf{M}) = \sum_{i=1}^m \mathbb{E}[(Y_i - \hat{Y}_i)^2]\]
Solution: \[W^* = K_{\mathbf{XX}}^{-1}K_{\mathbf{XY}}\]
where \(K_{\mathbf{XY}} = \mathbb{E}[\mathbf{X}\mathbf{Y}^T] - \mathbb{E}[\mathbf{X}]\mathbb{E}[\mathbf{Y}]^T\)
Key: Solve \(m\) separate LMMSE problems
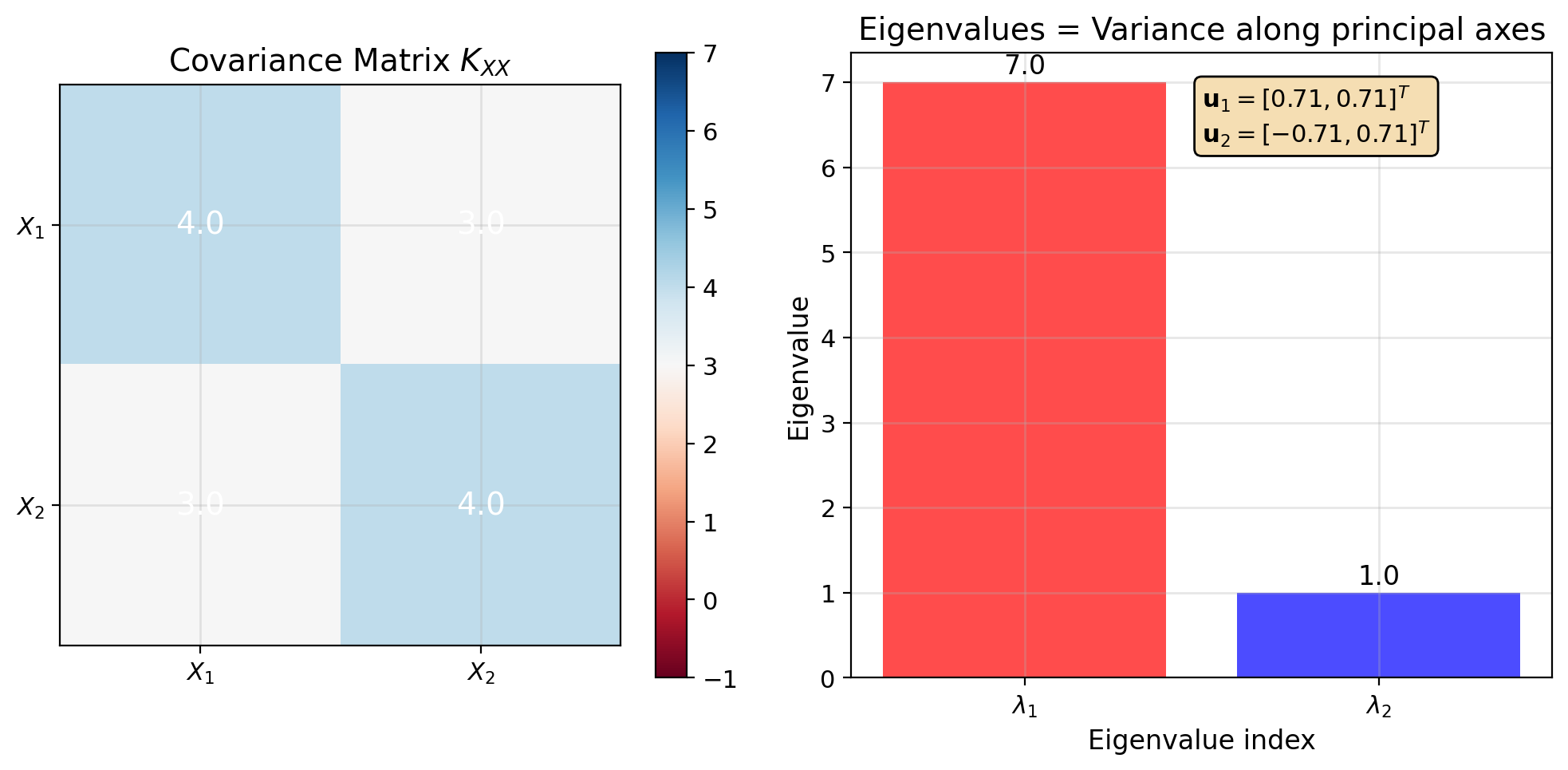
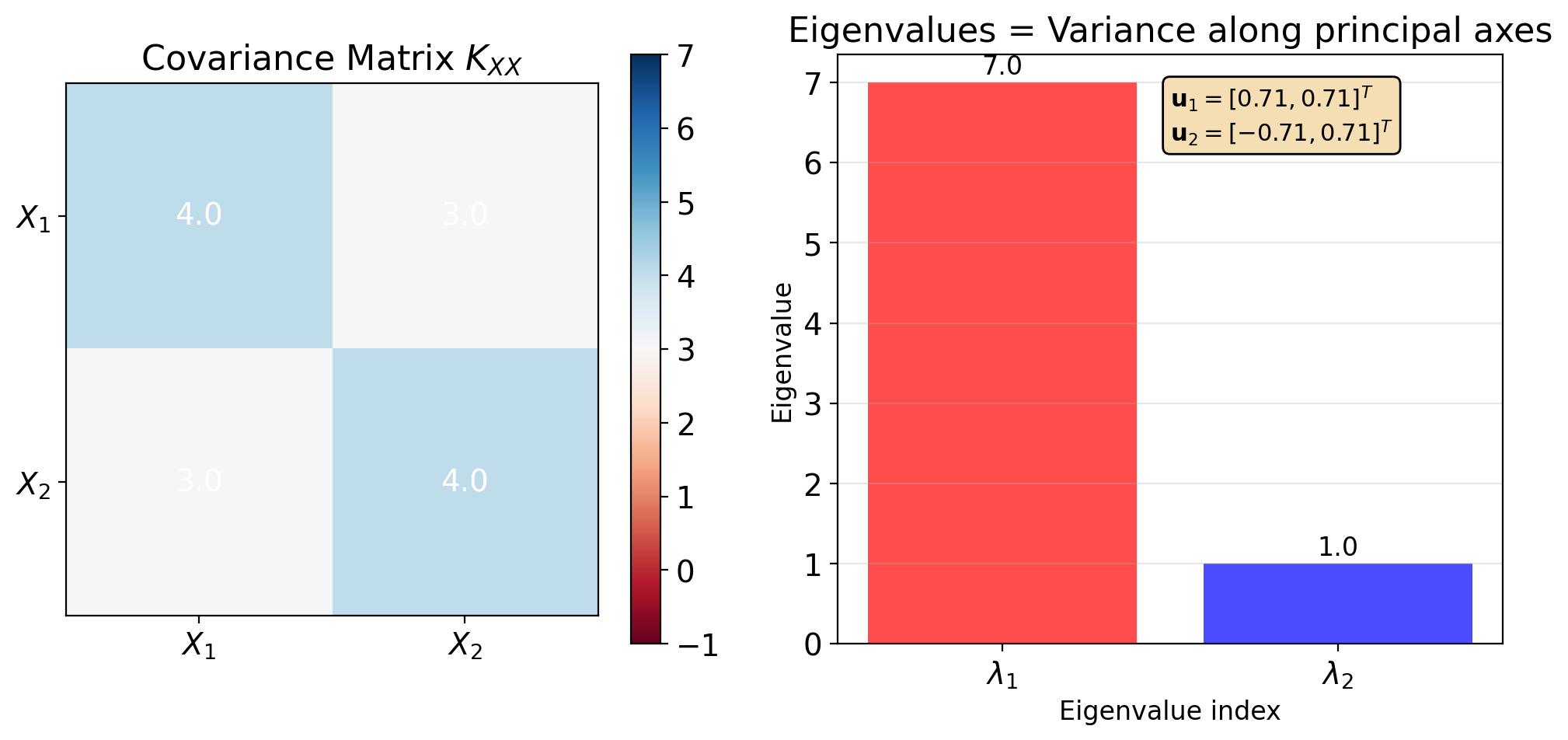
Eigendecomposition Diagonalizes the Covariance
Computational cost:
When \(K_{\mathbf{XX}}\) has off-diagonal terms:
- Matrix inversion requires \(O(p^3)\) operations
- All variables coupled in solution
- Numerical instability for ill-conditioned matrices
Eigendecomposition approach:
Any symmetric positive semi-definite matrix: \[K_{\mathbf{XX}} = U\Lambda U^T\]
where:
- \(U = [\mathbf{u}_1, \mathbf{u}_2, ..., \mathbf{u}_p]\) orthonormal
- \(\Lambda = \text{diag}(\lambda_1, \lambda_2, ..., \lambda_p)\)
- \(\lambda_1 \geq \lambda_2 \geq ... \geq \lambda_p \geq 0\)
Eigenvectors are orthogonal \[\mathbf{u}_i^T \mathbf{u}_j = \delta_{ij}\]
This orthogonality simplifies coordinate transformation.
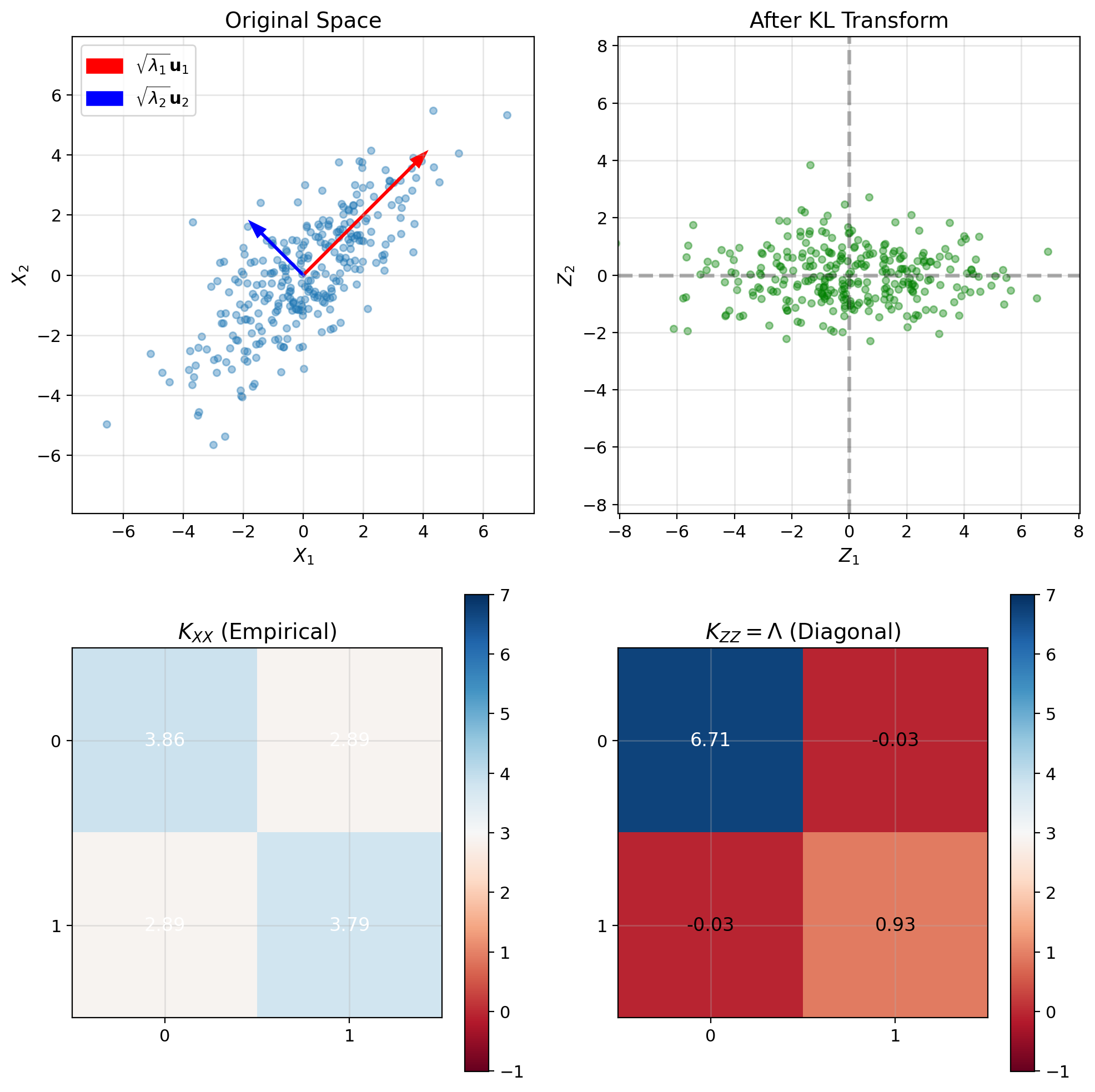
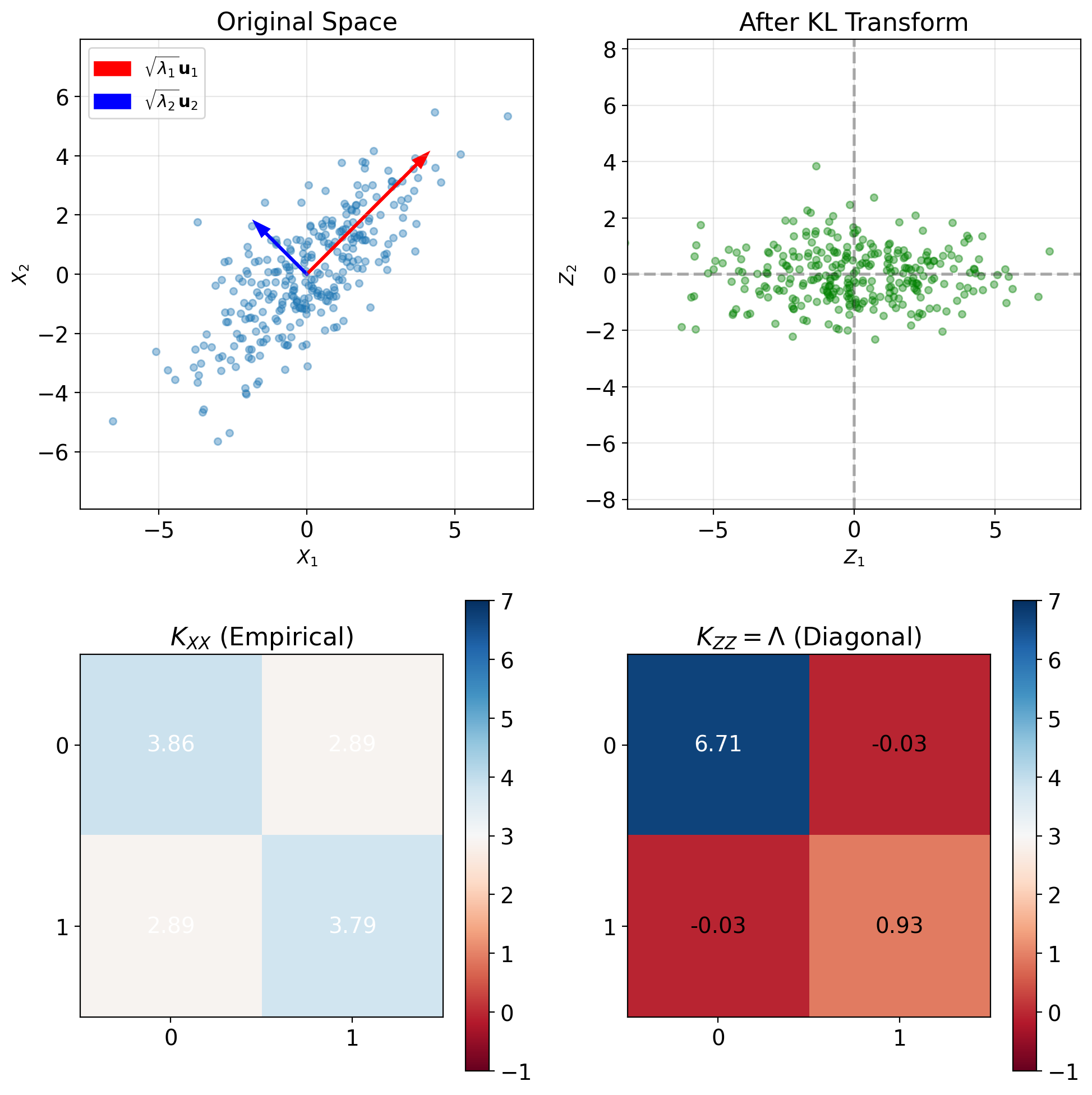
KL Transform Produces Uncorrelated Components
Coordinate transformation: \[\mathbf{Z} = U^T\mathbf{X}\]
Covariance in new coordinates: \[K_{\mathbf{ZZ}} = \mathbb{E}[\mathbf{Z}\mathbf{Z}^T]\] \[= \mathbb{E}[U^T\mathbf{X}\mathbf{X}^TU]\] \[= U^T\mathbb{E}[\mathbf{X}\mathbf{X}^T]U\] \[= U^TK_{\mathbf{XX}}U\] \[= U^T(U\Lambda U^T)U\] \[= \Lambda\]
Result: Diagonal covariance matrix
Components of \(\mathbf{Z}\) are uncorrelated: \[\mathbb{E}[Z_iZ_j] = \lambda_i\delta_{ij}\]
Inverse transform (reconstruction): \[\mathbf{X} = U\mathbf{Z}\]
Since \(U\) is orthonormal: \(U^TU = I\)
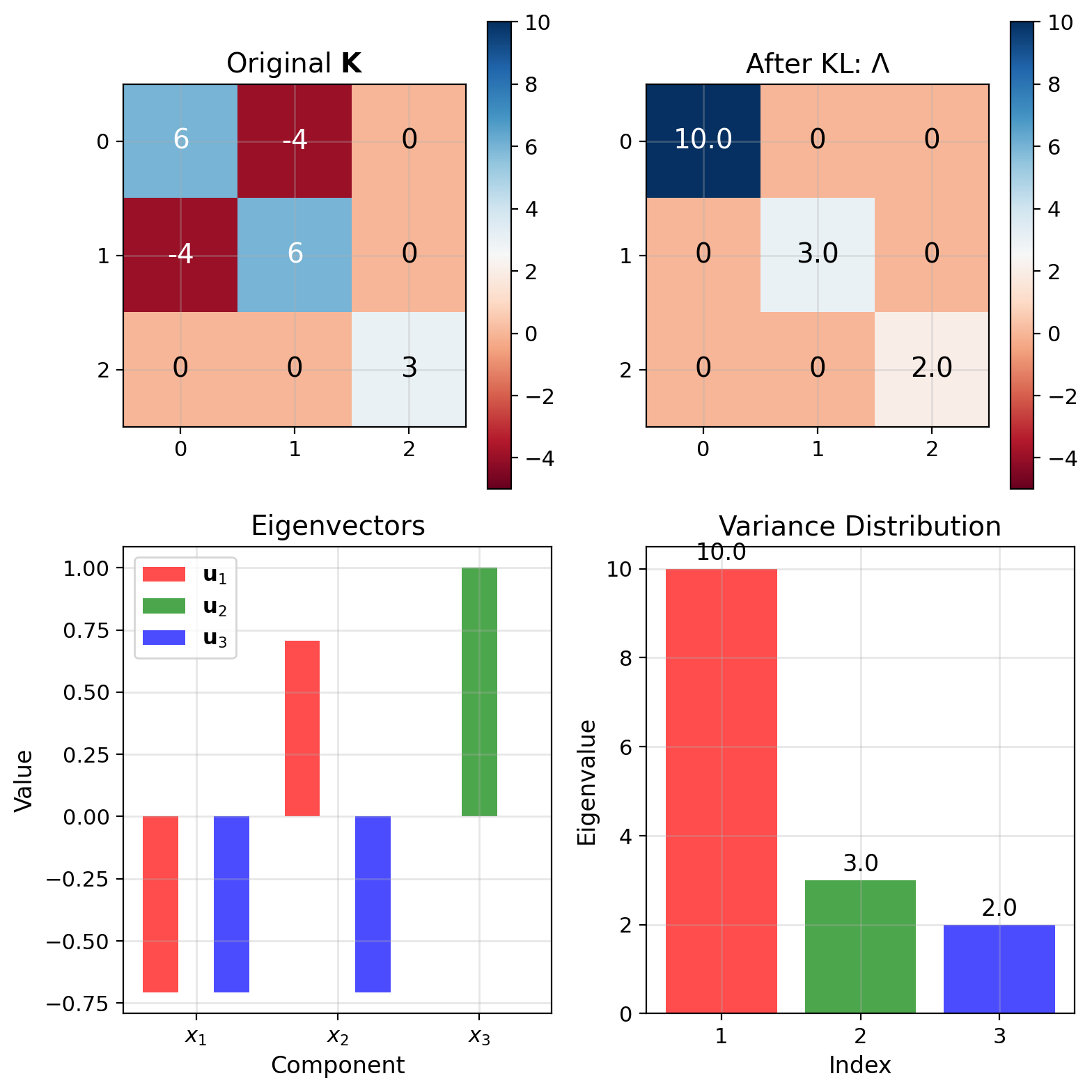
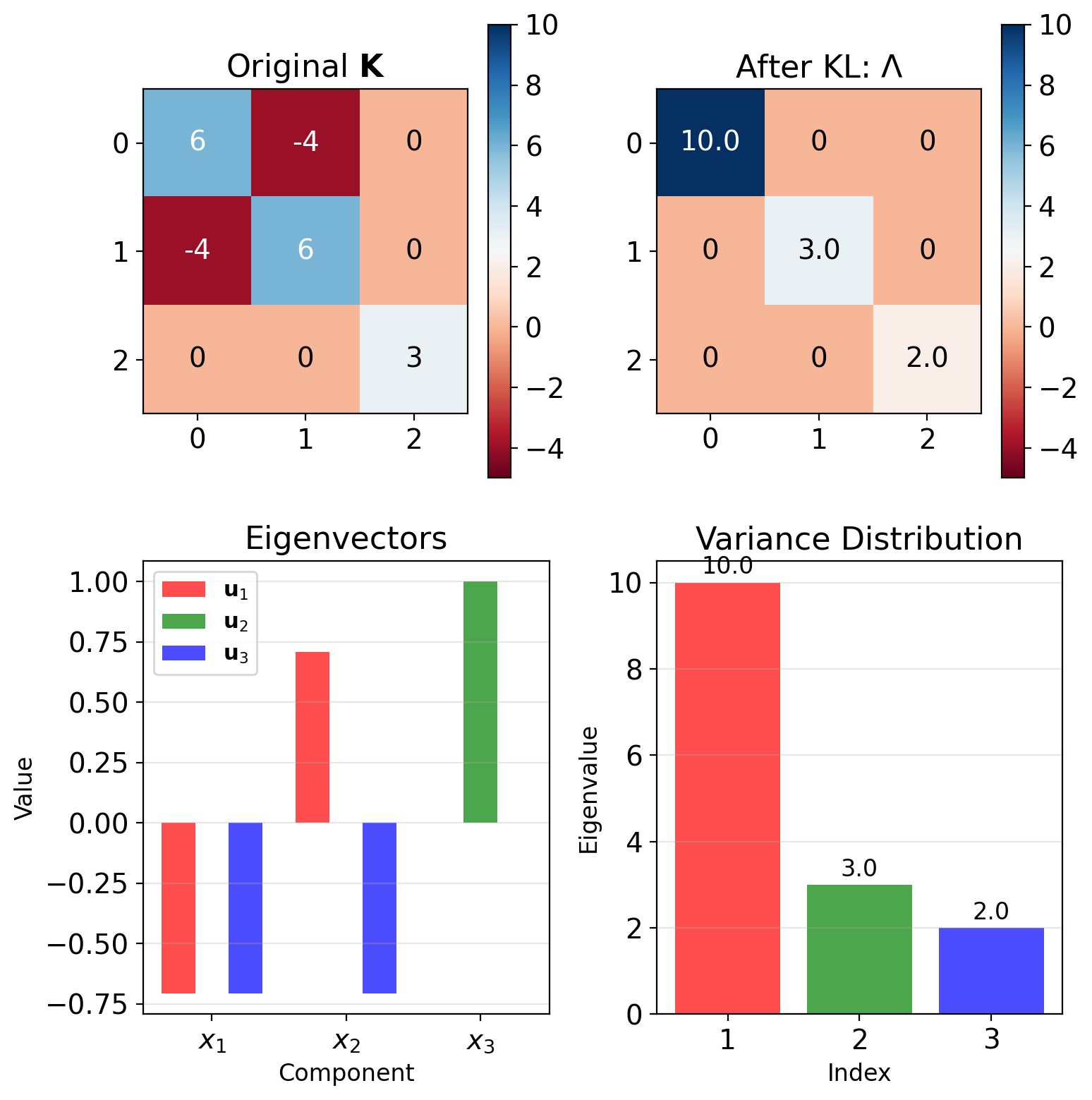
Worked Example: Diagonalizing a 3×3 Covariance
Given covariance: \[\mathbf{K} = \begin{bmatrix} 6 & -4 & 0 \\ -4 & 6 & 0 \\ 0 & 0 & 3 \end{bmatrix}\]
Find eigenvalues: Solve \(\det(\mathbf{K} - \lambda\mathbf{I}) = 0\)
Block structure simplifies:
- Upper 2×2 block: \(\lambda_{1,2} = 6 \pm 4\)
- Lower 1×1 block: \(\lambda_3 = 3\)
Result: \(\lambda_1 = 10, \lambda_2 = 3, \lambda_3 = 2\)
Find eigenvectors: Solve \((\mathbf{K} - \lambda_i\mathbf{I})\mathbf{v} = 0\)
\[\mathbf{u}_1 = \frac{1}{\sqrt{2}}\begin{bmatrix}1\\-1\\0\end{bmatrix}, \quad \mathbf{u}_2 = \begin{bmatrix}0\\0\\1\end{bmatrix}, \quad \mathbf{u}_3 = \frac{1}{\sqrt{2}}\begin{bmatrix}1\\1\\0\end{bmatrix}\]
Result: \(\mathbf{K}_{zz} = \text{diag}(10, 3, 2)\)
Decorrelated Coordinates Decouple LMMSE
Original problem (coupled): \[\hat{\mathbf{X}} = K_{\mathbf{XY}} K_{\mathbf{YY}}^{-1} \mathbf{Y}\]
Requires inverting full matrix \(K_{\mathbf{YY}}\).
After KL transform:
- Transform: \(\mathbf{Z} = U^T\mathbf{X}\), \(\mathbf{W} = V^T\mathbf{Y}\)
- Covariances become diagonal
- Decouples LMMSE:
\[\hat{Z}_i = \frac{\text{Cov}(Z_i, W_i)}{\text{Var}(W_i)} W_i\]
Each component solved independently.
Computational advantage:
- Original: \(O(p^3)\) for matrix inversion
- KL approach: \(O(p^2)\) for eigendecomposition, then \(O(p)\) for solution
Numerical stability: Small eigenvalues → regularization: \[\hat{Z}_i = \frac{\text{Cov}(Z_i, W_i)}{\lambda_i + \epsilon} W_i\]
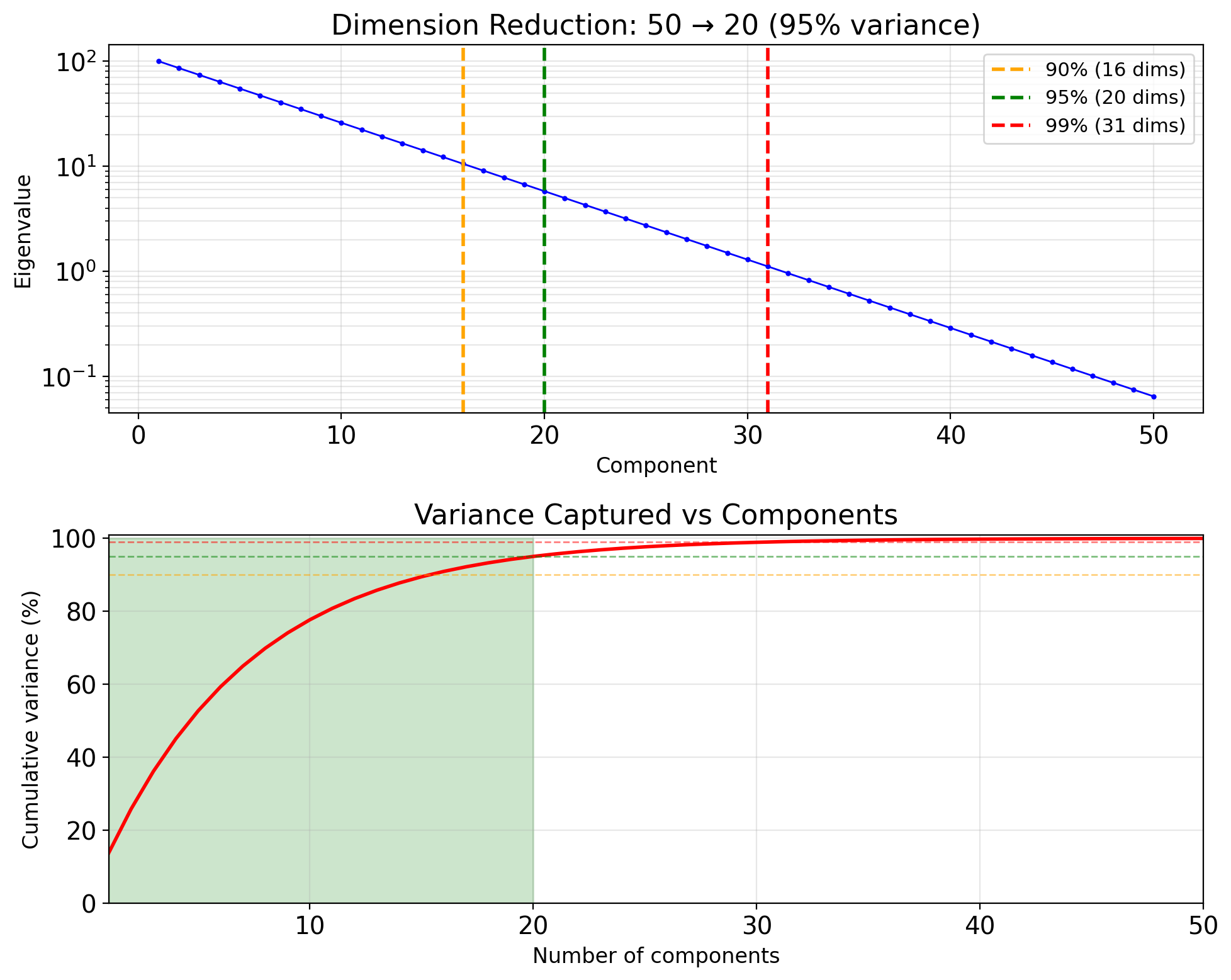
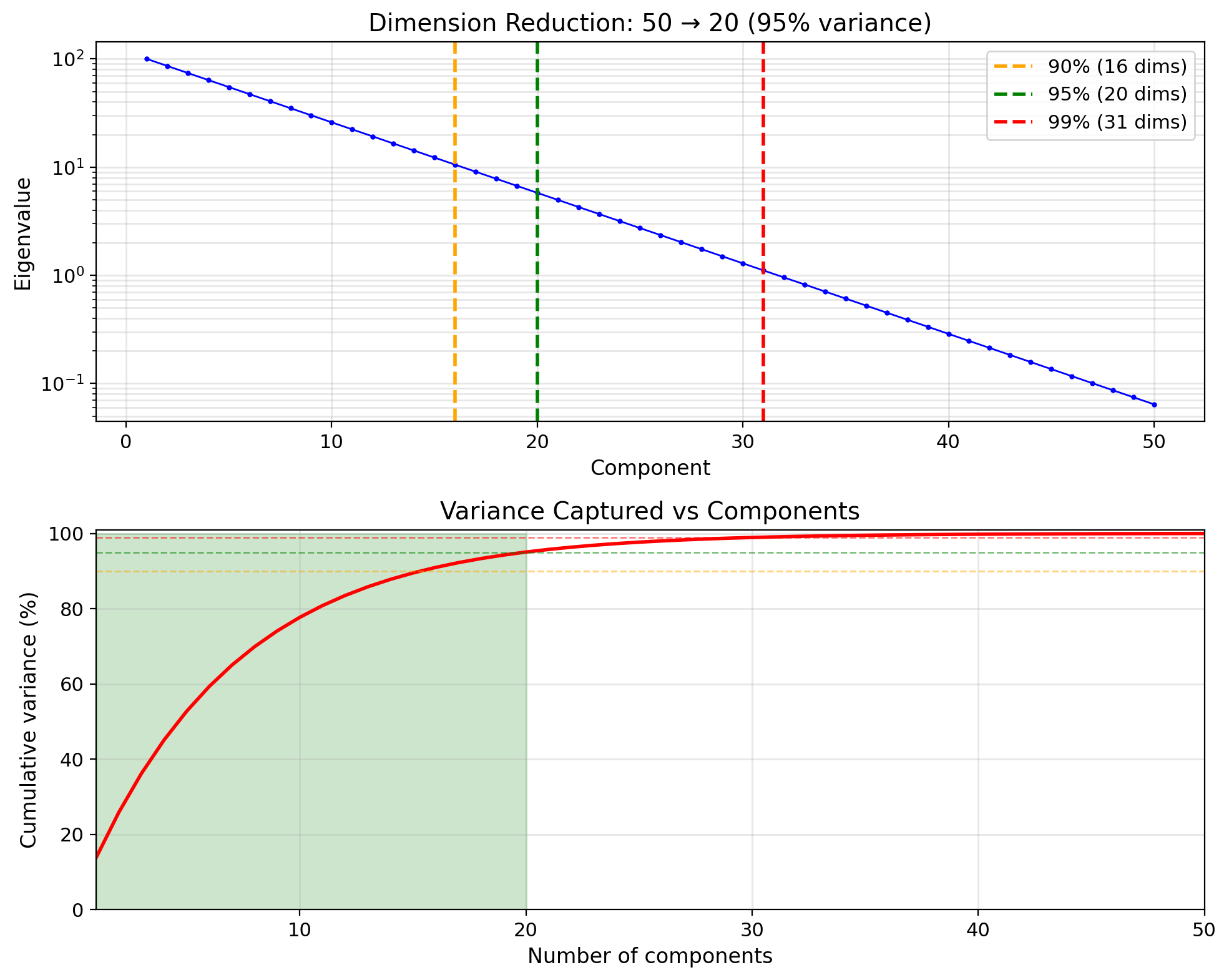
Truncating Eigenvalues Trades MSE for Dimensionality
Not all dimensions equally informative
Eigenvalues measure variance (information) per dimension.
Truncated representation: Keep only first \(k < p\) components: \[\mathbf{X} \approx \sum_{i=1}^k Z_i \mathbf{u}_i\]
Selection criterion: Retain fraction \(\alpha\) of total variance: \[\frac{\sum_{i=1}^k \lambda_i}{\sum_{i=1}^p \lambda_i} \geq \alpha\]
Common choice: \(\alpha = 0.95\) or \(0.99\)
Reconstruction error: \[\mathbb{E}[\|\mathbf{X} - \hat{\mathbf{X}}_k\|^2] = \sum_{i=k+1}^p \lambda_i\]
Error equals sum of discarded eigenvalues.
Applications:
- Principal Component Analysis (PCA)
- Data compression
- Denoising (discard noisy dimensions)